
RoboCup: Assistive Drinking Device for Wheelchair UsersBy Thomas Kutcher and Rafe Neathery Sponsored by our client Gary Lynn, advised by Dr. Maria Oden, and with special thanks to Melissa Cantu and Divya Wagh |
DIY Manual
Any questions or feedback? Contact us at robocupengi200@gmail.com
 The RoboCup is a robotic device that allows users with limited mobility to drink autonomously. This device was originally designed for our client with cerebral palsy who does not have the dexterity to hold a cup and drink on his own. We have developed an open-source solution that will allow those in similar situations to have the independence to drink when they want. Skills Required: Assembly of the RoboCup only requires access to a 3D printer and following the instructions carefully. |

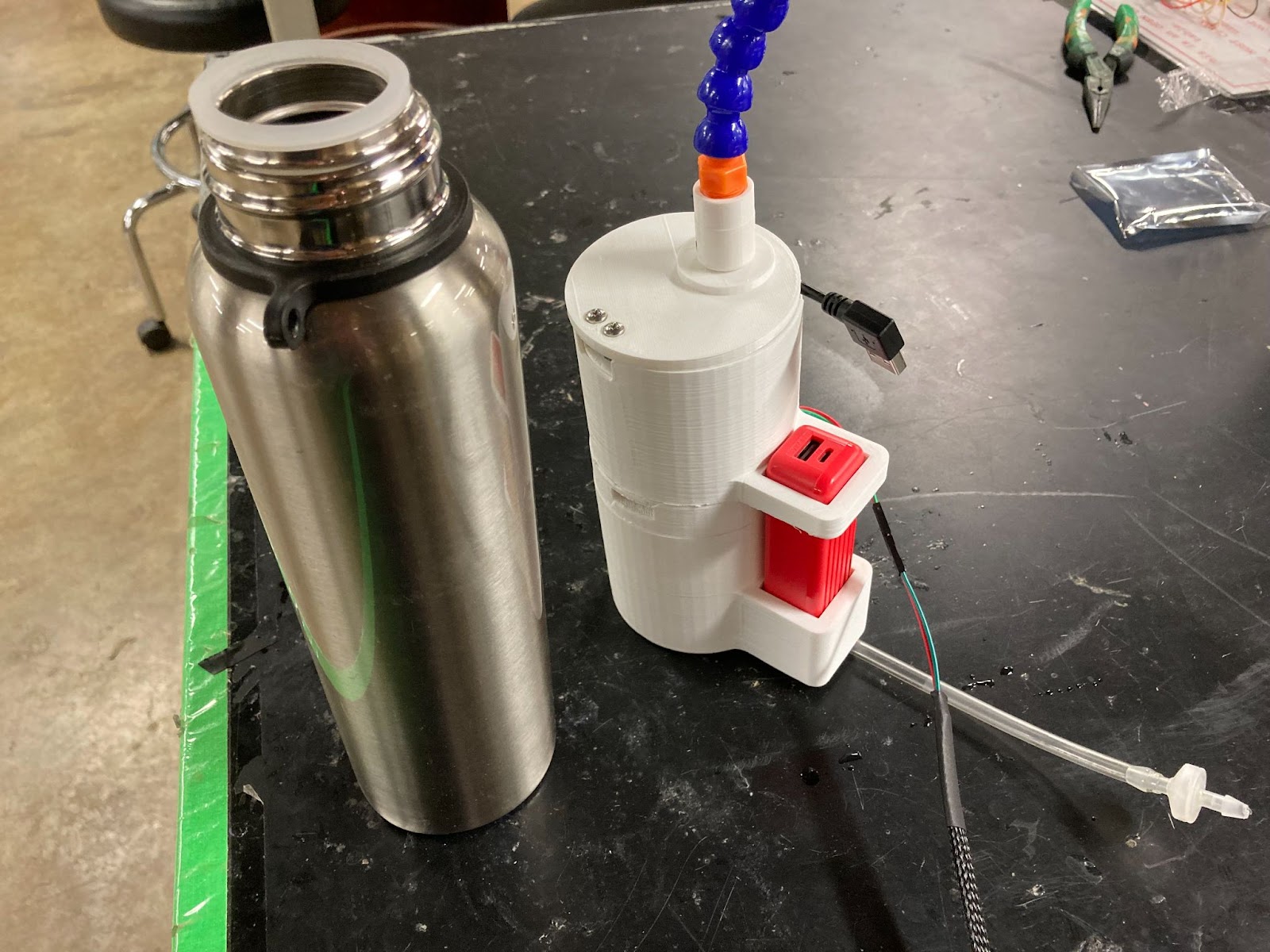
RoboCup setup with proximity sensor
.jpg)
Parts
Option between small and large diameter tubing:
-
PVC Soft Plastic Tubing Clear, 3/16" ID, 1/4" OD AND Push-to-Connect Tube Fitting with Universal Thread 1/4" Tube OD x 1/8 Pipe OR PVC Soft Plastic Tubing Clear, 1/4" ID, 3/8" OD AND Push-to-Connect Tube Fitting with Universal Thread 3/8" Tube OD x 1/8 Pipe
Option between proximity sensor and button:
-
Pololu Digital Distance Sensor 5cm AND Mini Solderless Breadboard - 4x4 Points OR 25pcsTact Tactile Push Button Switch AND Mini Solderless Breadboard - 2x4 Points
Option between larger/cheaper plastic bottle and thermos:
-
Imrider Sports 32oz Water Bottle OR GOOFIT Insulated Thermos with Cup
-
2PCS Bicycle Water Bottle Cages
-
18-8 Stainless Steel Phillips Oval Head Screws 6-32 Thread, 3/8" Long
-
Low-Strength Steel Hex Nut Zinc-Plated, 6-32 Thread Size
-
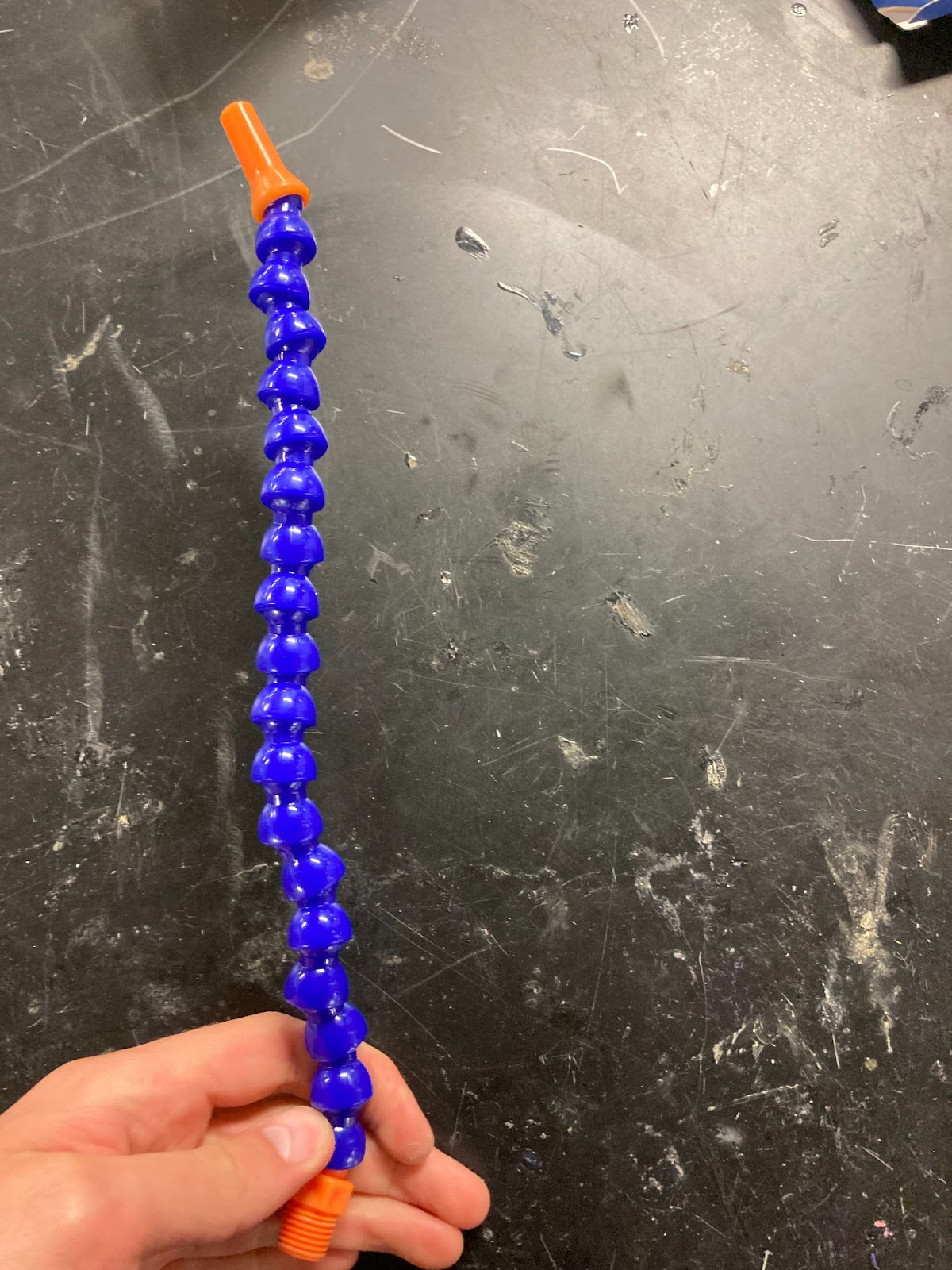
Round Nozzle 3/8 PT Plastic Flexible Oil Coolant Pipe Hose
-
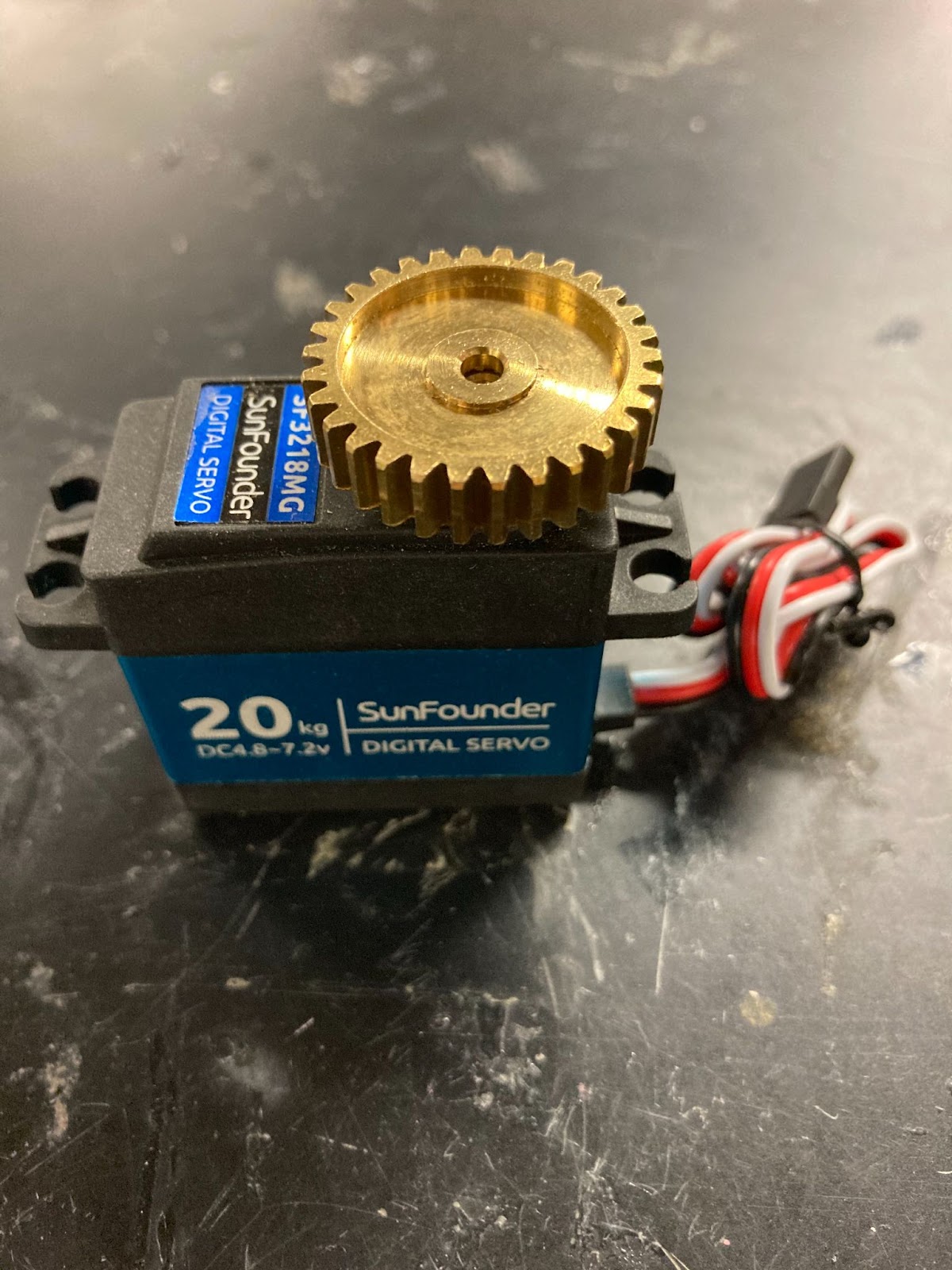
SunFounder 20KG Servo Motor SF3218MG
-
Spur Gear Brass 30 Tooth For Servo 25 Tooth Spline 0.8
-
Wires with Pre-Crimped Terminals 10-Piece 10-Color Assortment M-M 60"
-
120PCS Multicolor Jumper Wire Set Male to Male, Male to Female, Female to Female
-
0.1" (2.54mm) Crimp Connector Housing: 1x3-Pin 25-Pack
-
Braided Sleeving, 0.125 in, 10 Ft, Black
-
Wire Heat Shrink Tubing Kit
-
3-Pack Portable Charger
-
Herfair USB to Mini USB Cable
-
Arduino Nano
Optional Additions:
-
Quickun Inline Check Valve, 3/16" Hose ID One Way Return
-
4 Pack Bite Valve Replacement and 90 Degree Silicone Mouthpiece

Electrical Assembly |
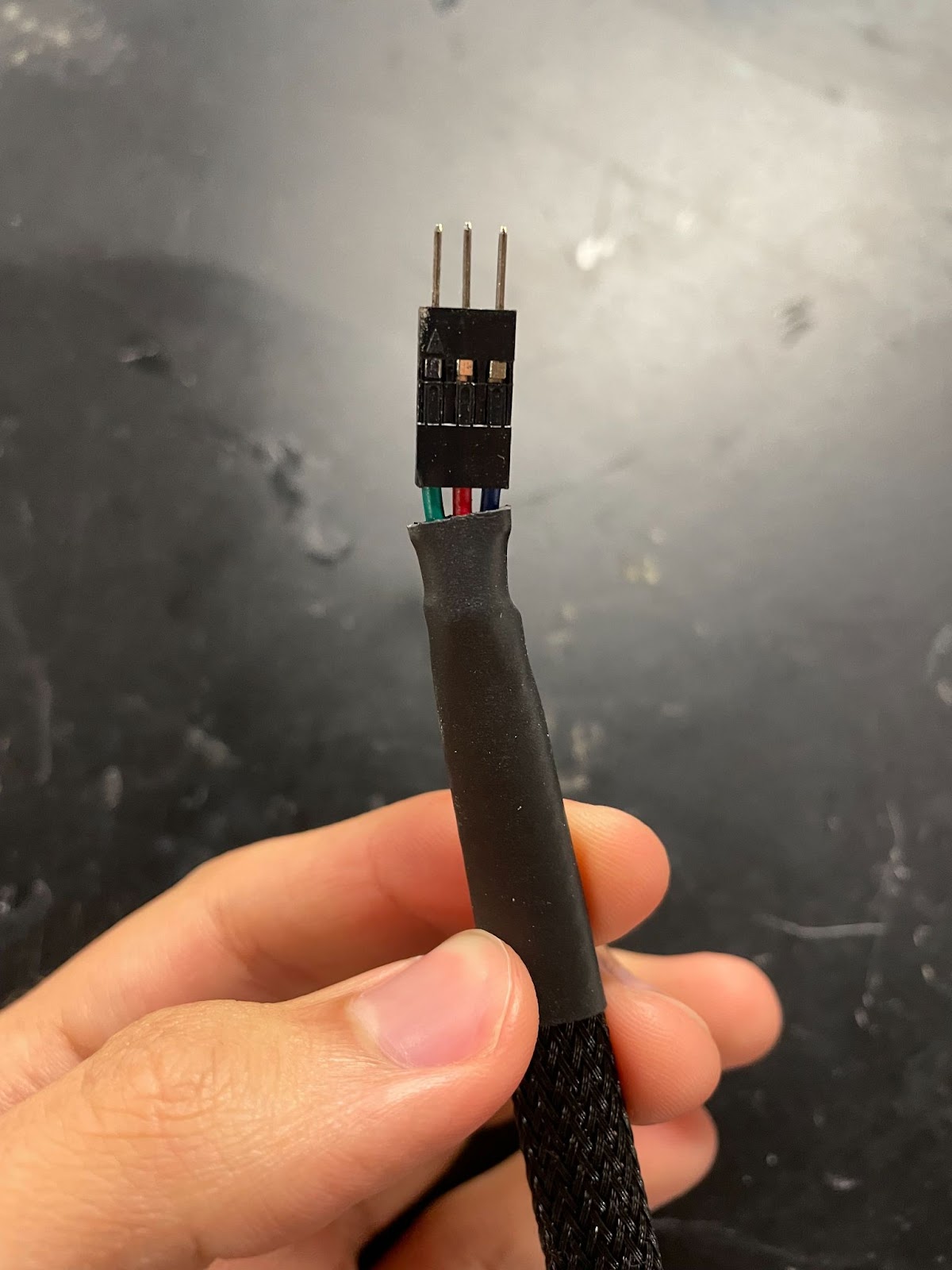

Wiring
|
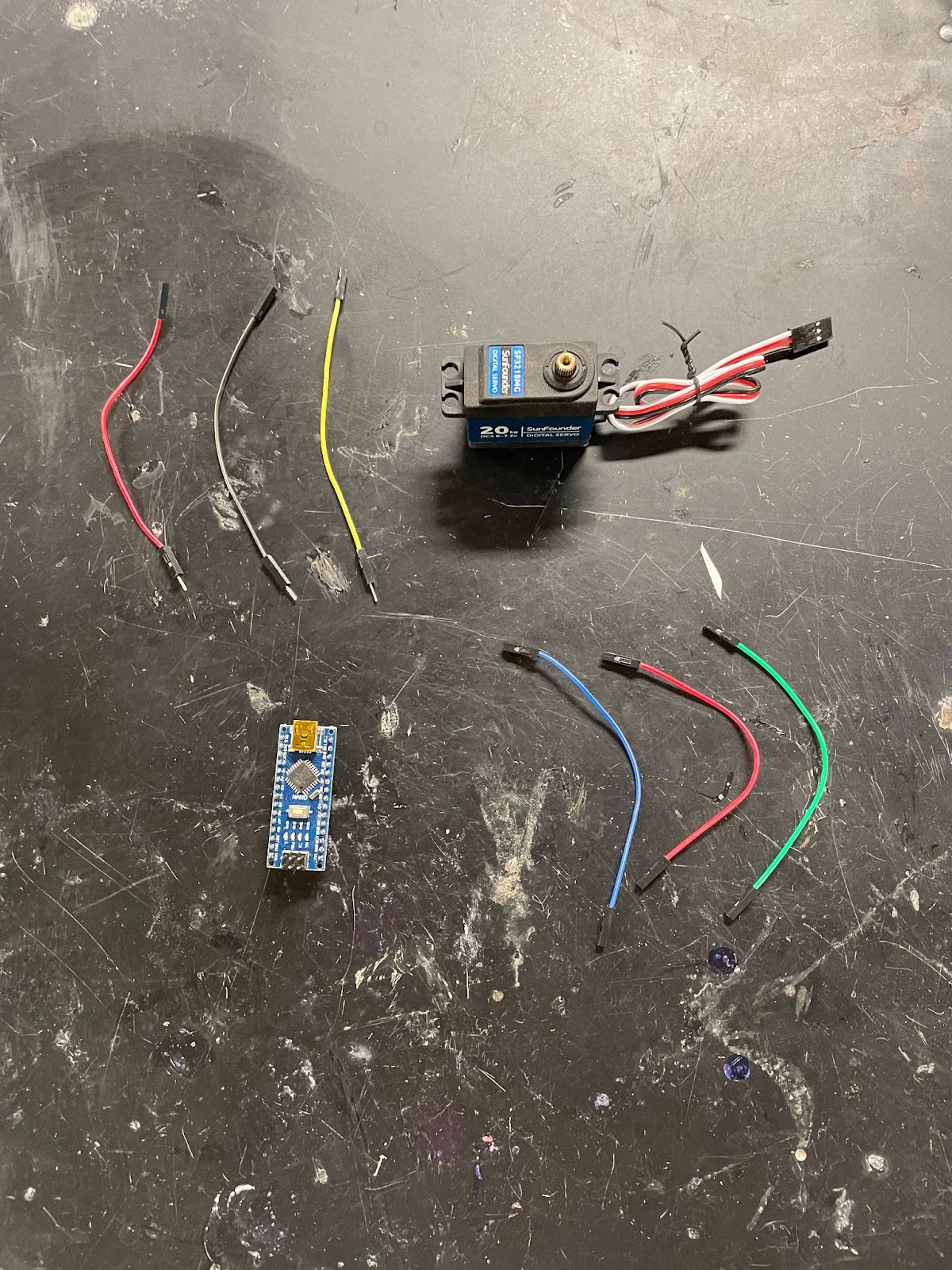

Arduino
|
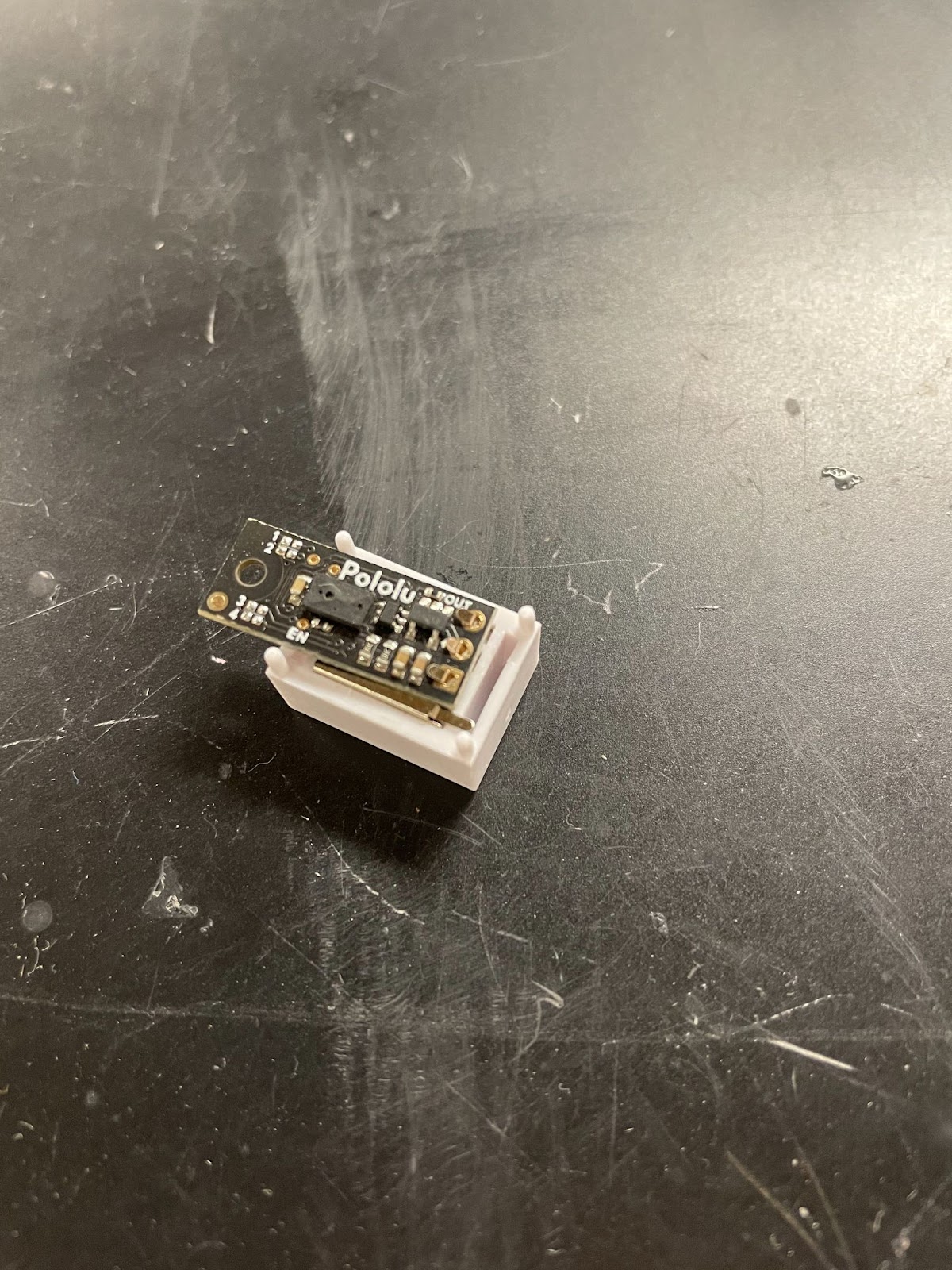

Proximity Sensor
|
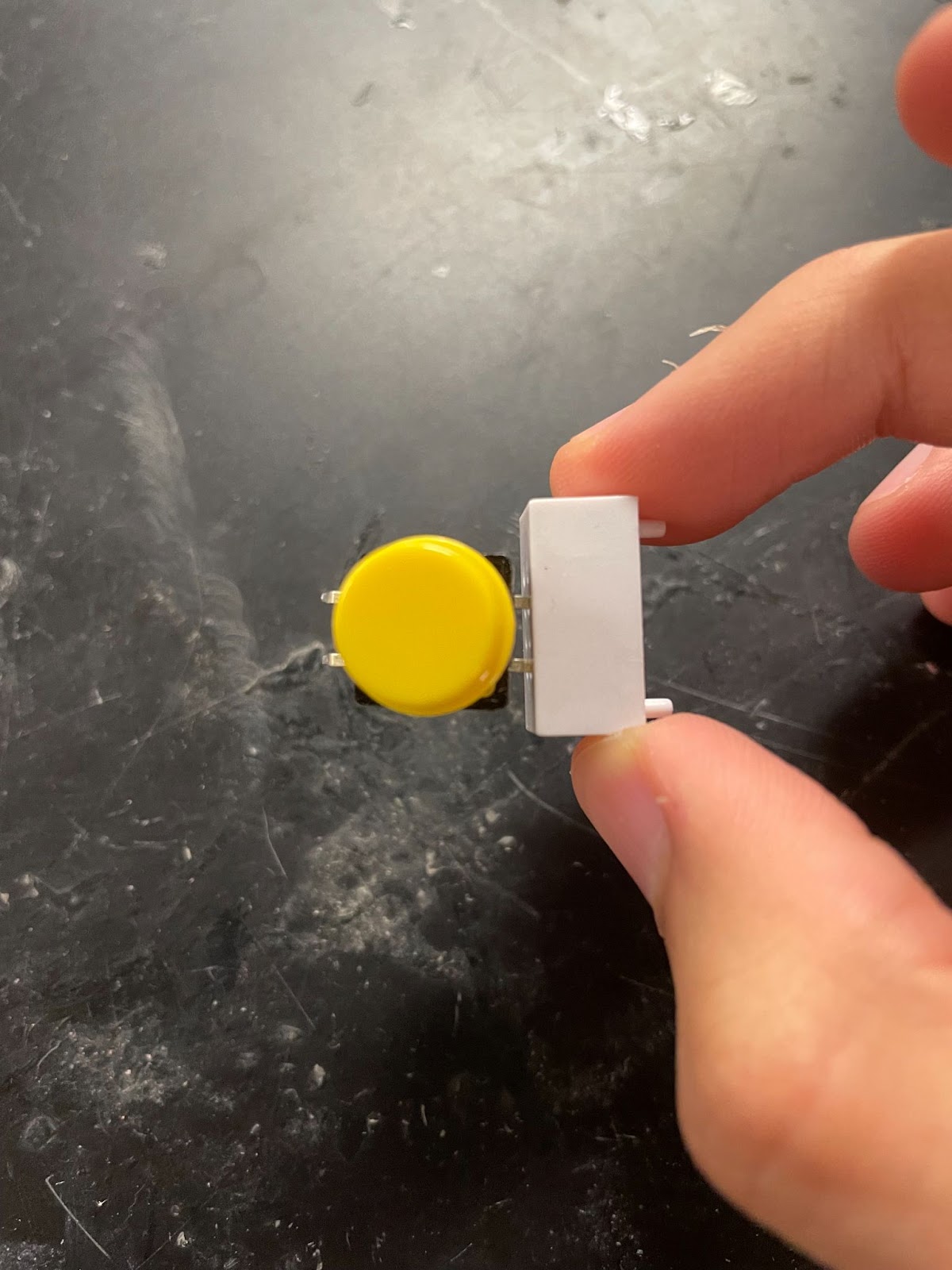


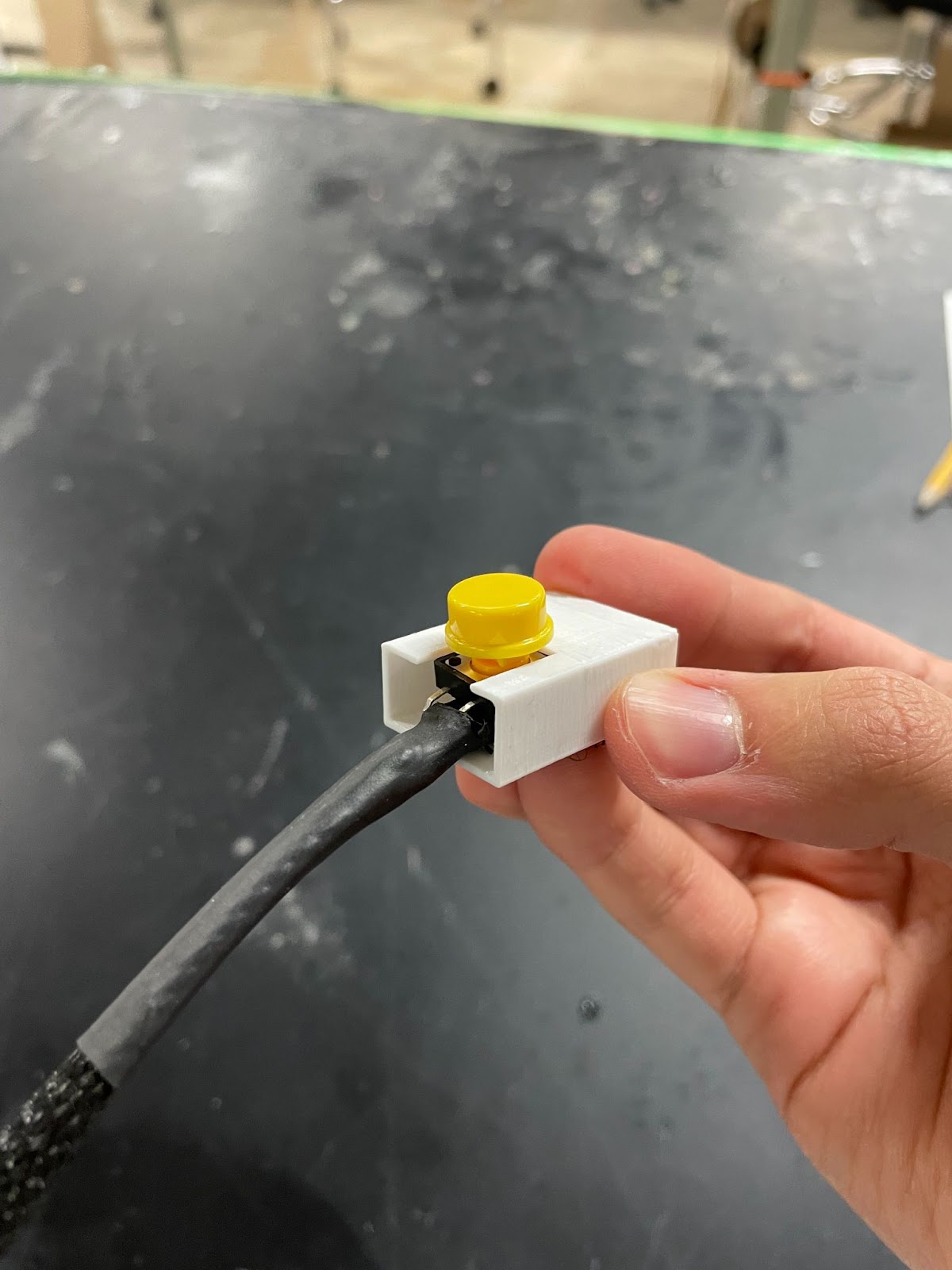
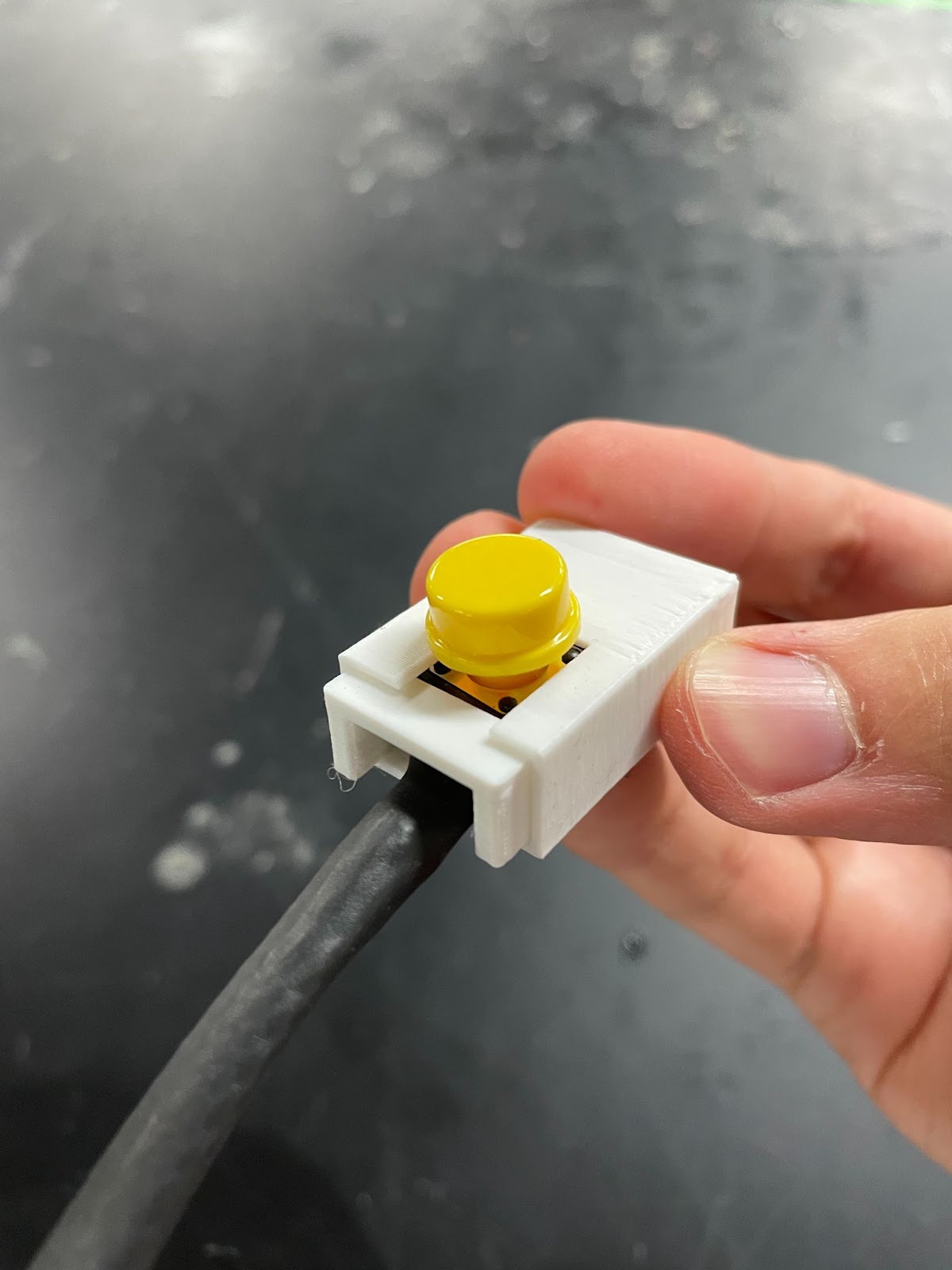
Button
|
|


|
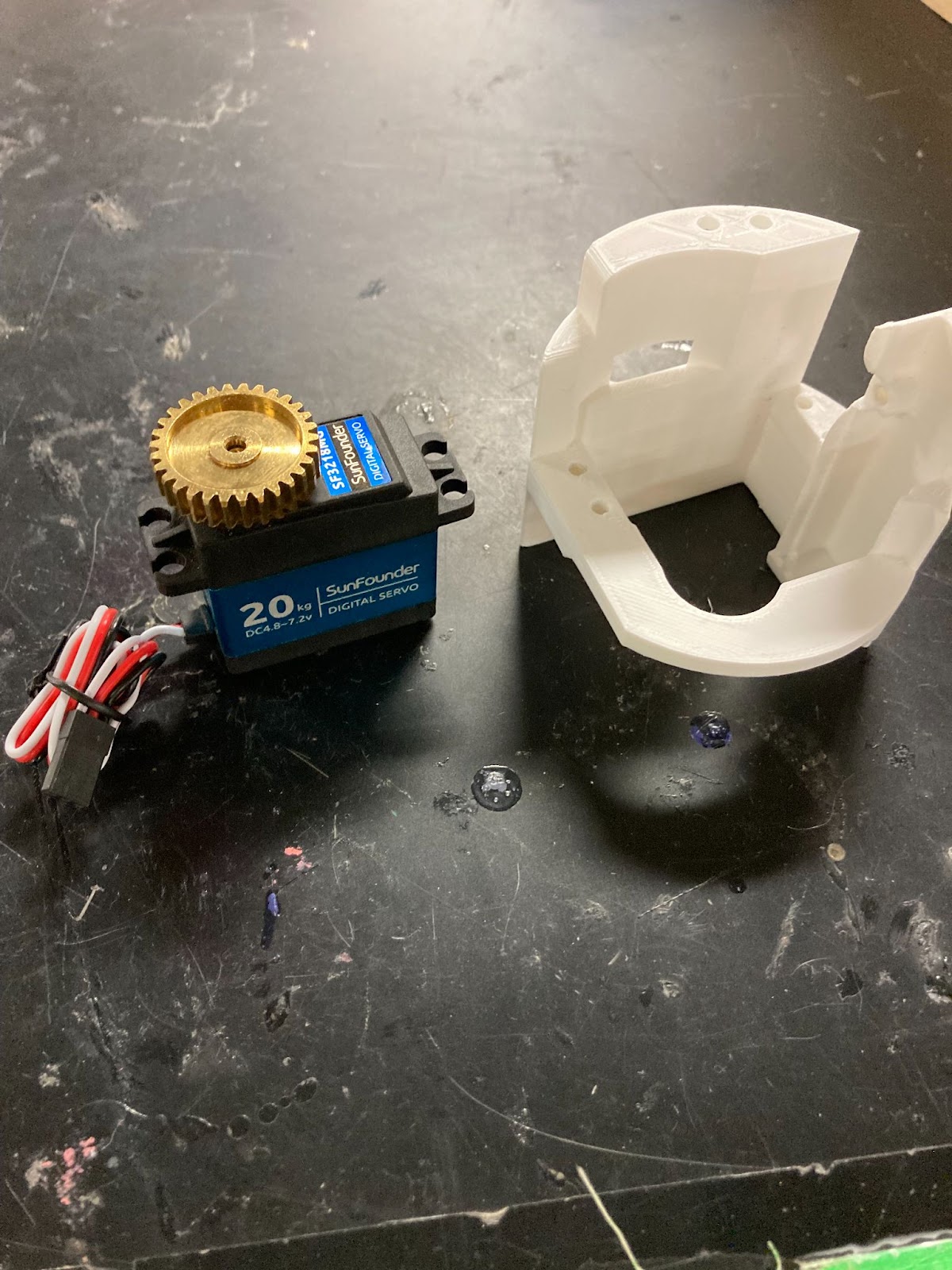


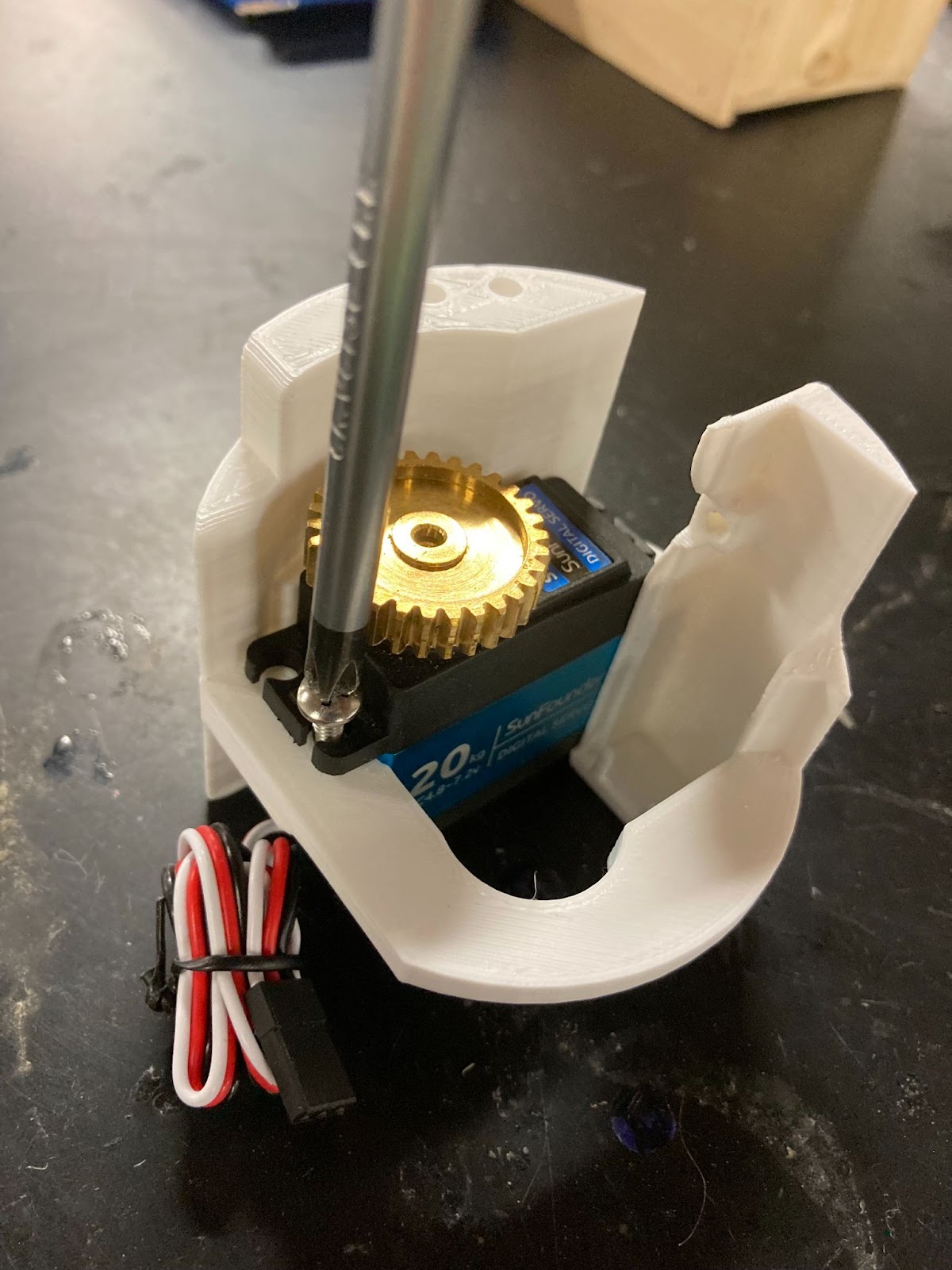
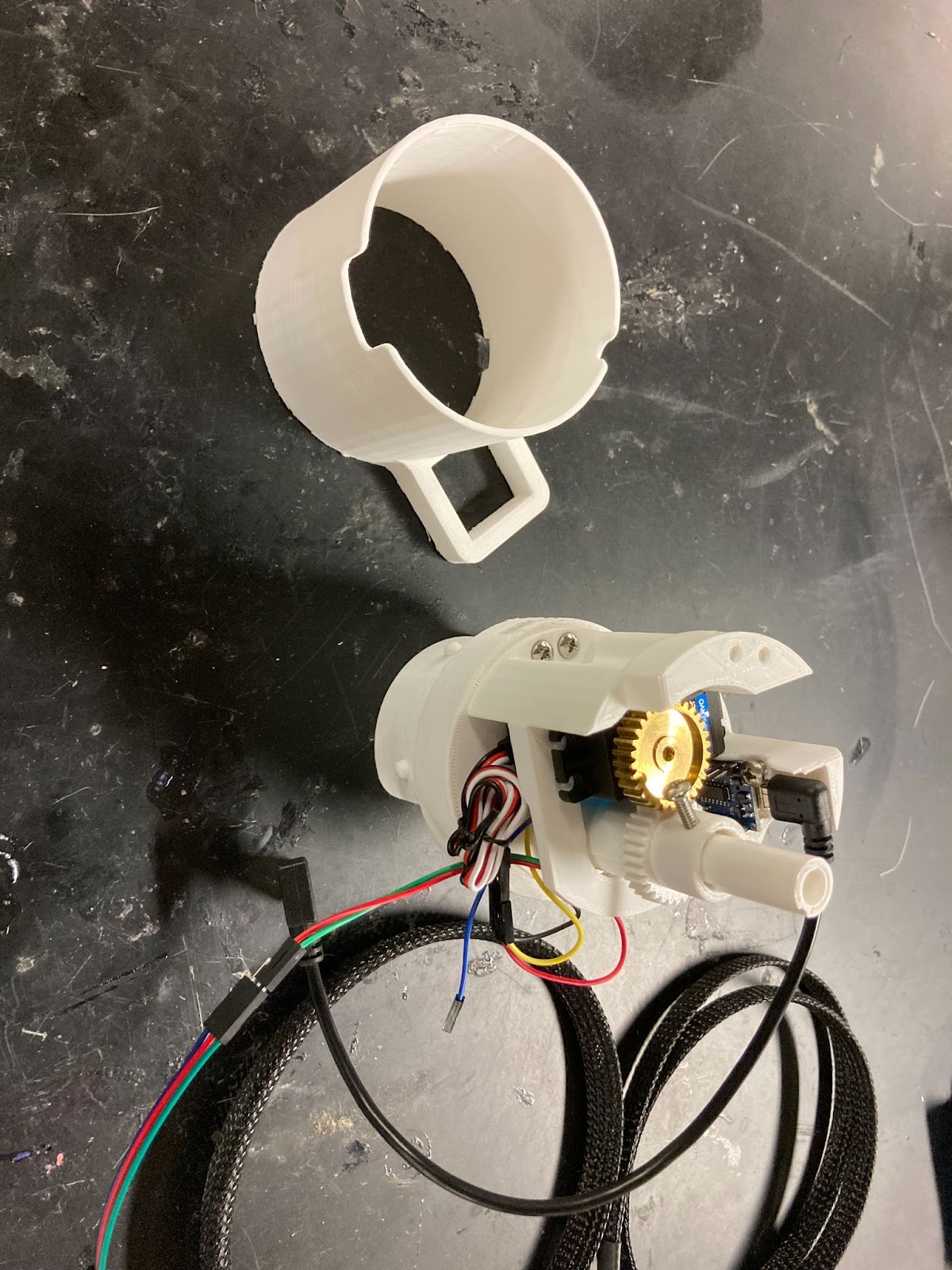
Add Servo to motor mount
|
|
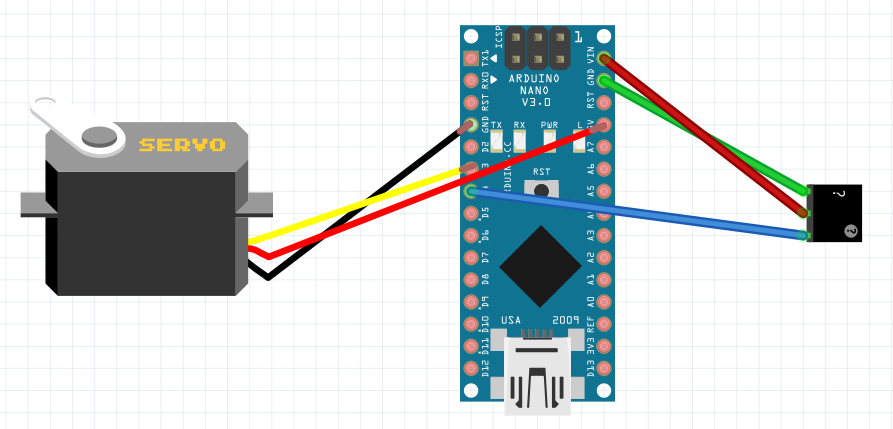

Wire Arduino to servo motor and sensor/button |
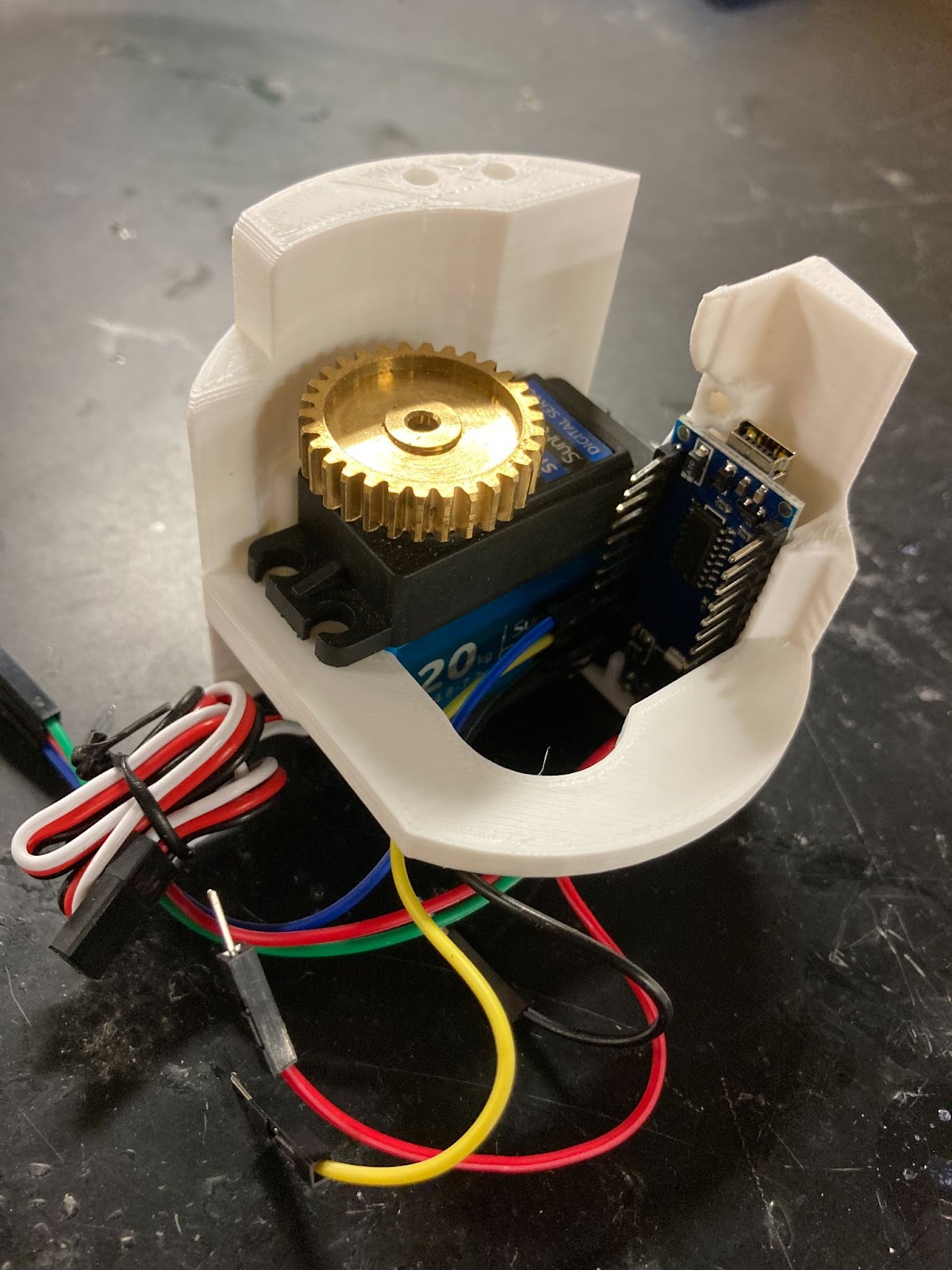

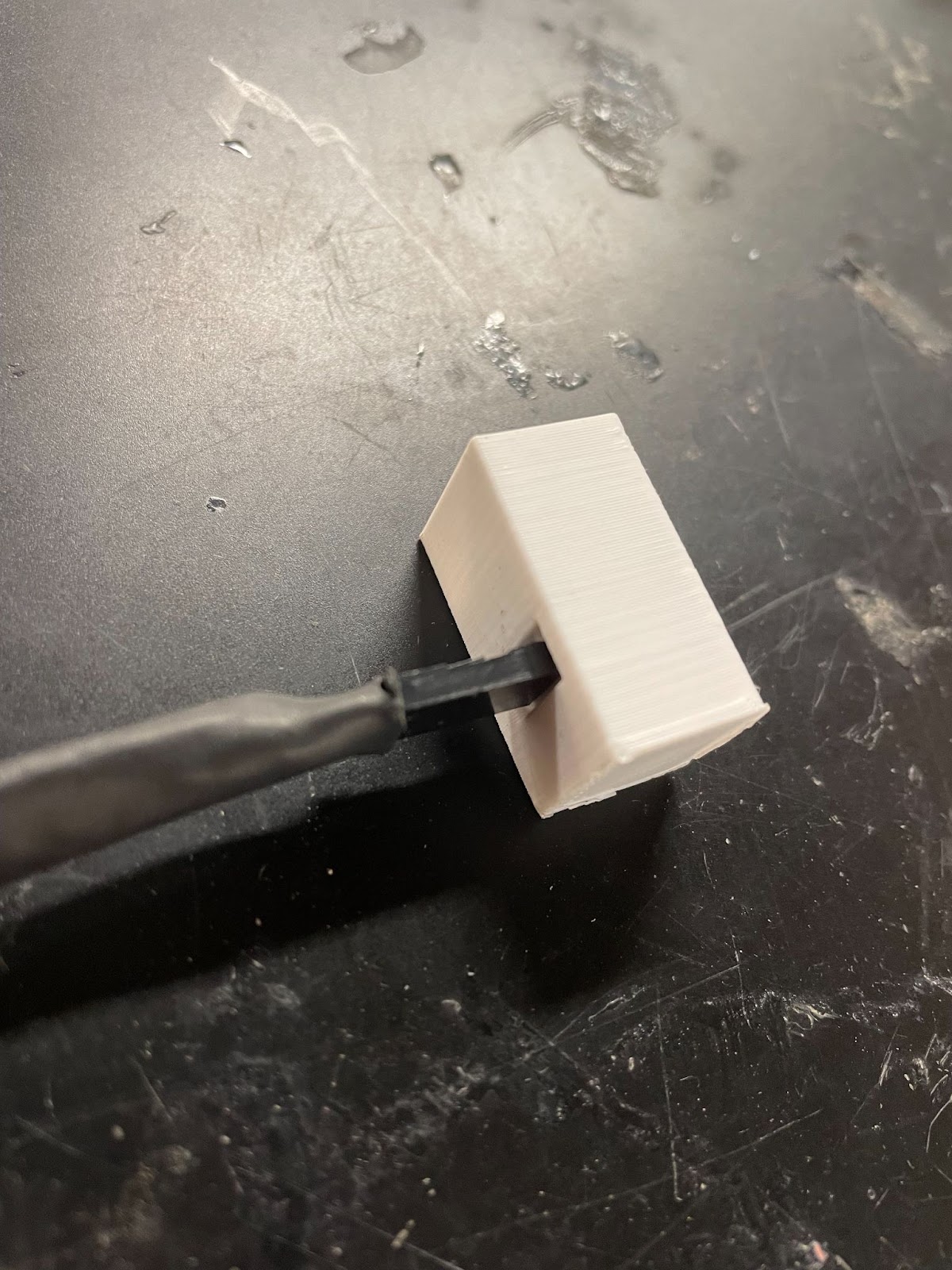
Slide arduino with wiring into the motor mount Put in one screw to hold the arduino in place. It should be tight in the 3d printed part. Ensure that the micro-usb port is facing upwards |
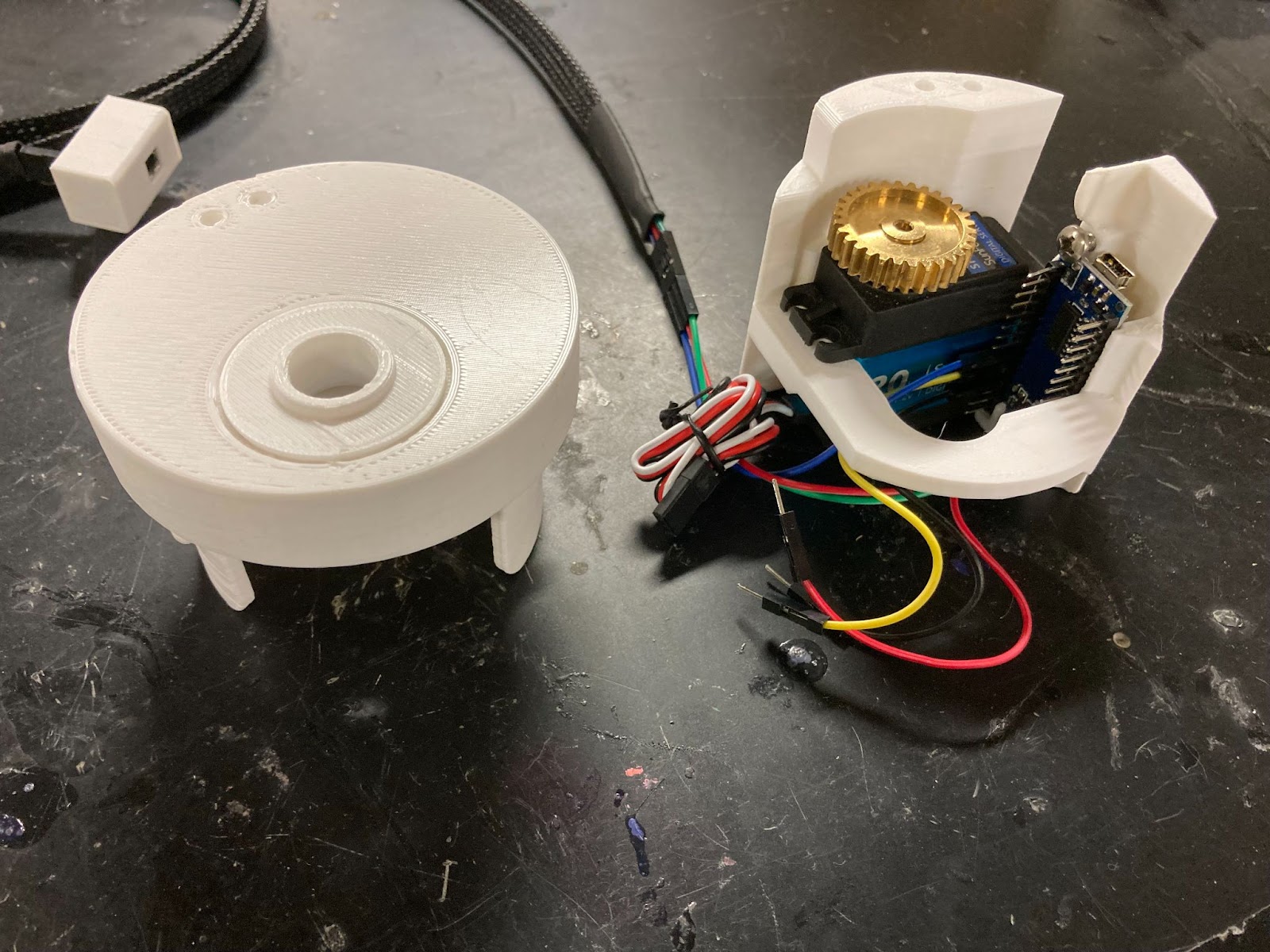




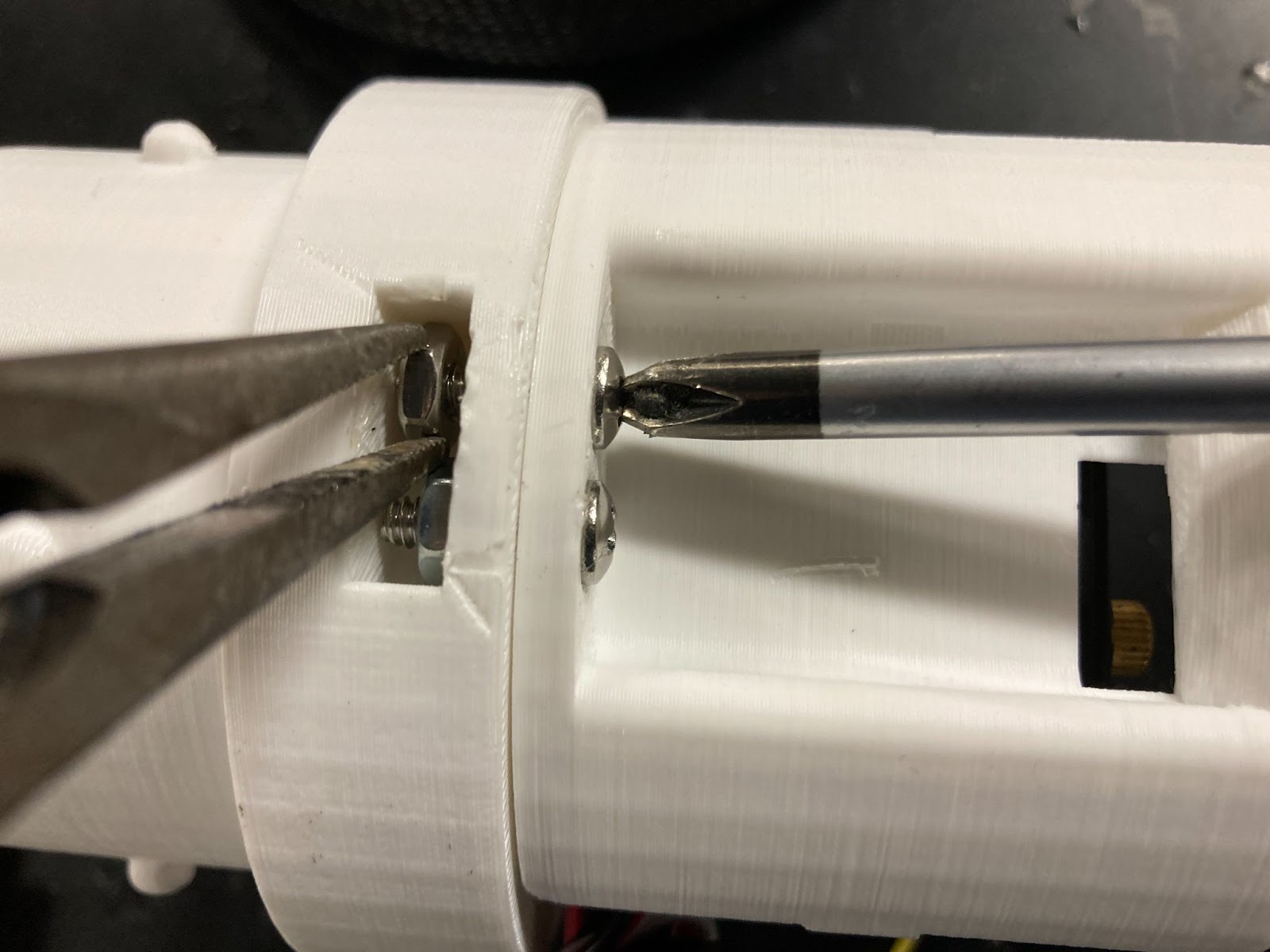

Bolt motor mount onto motor base
|
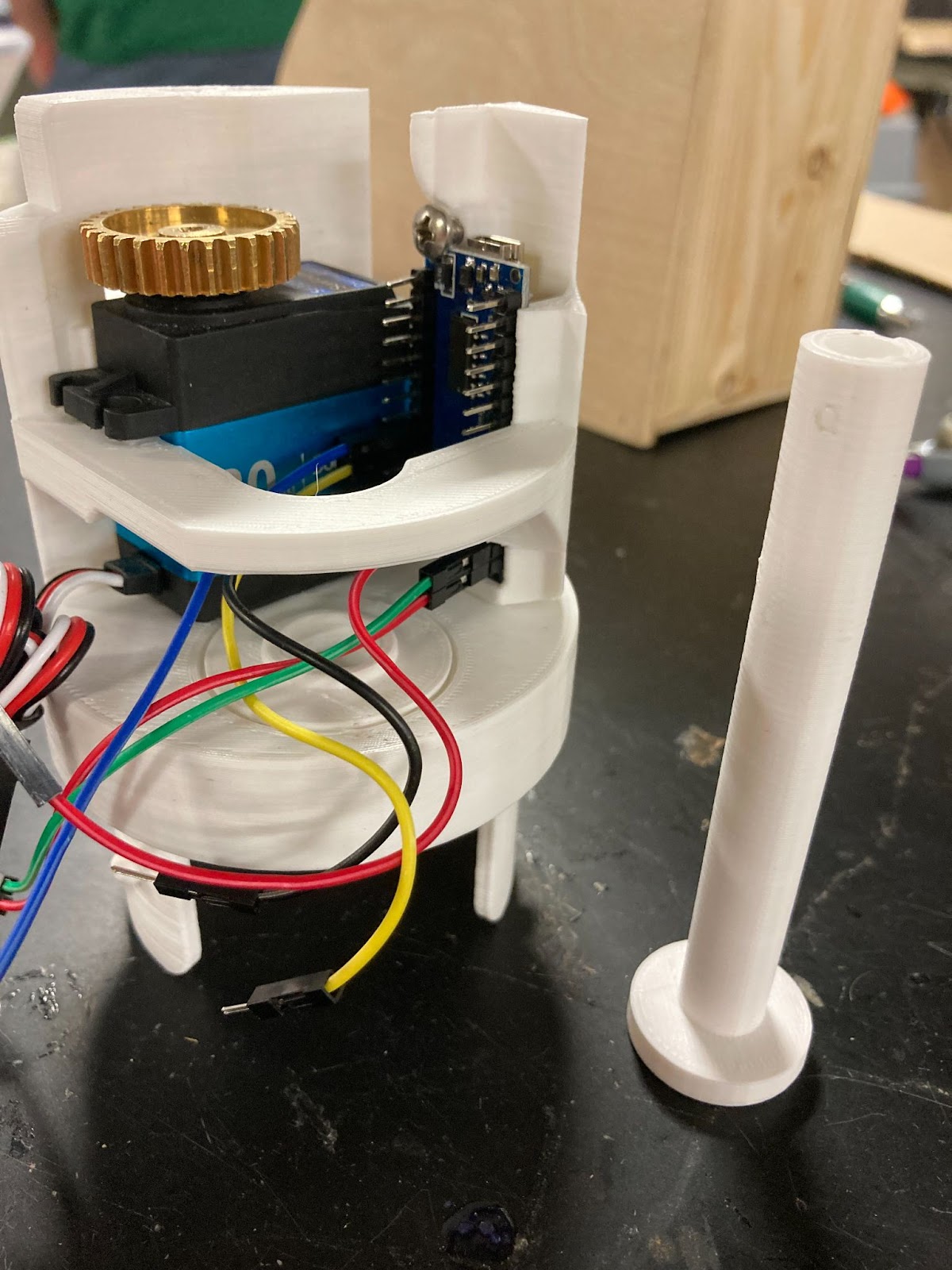

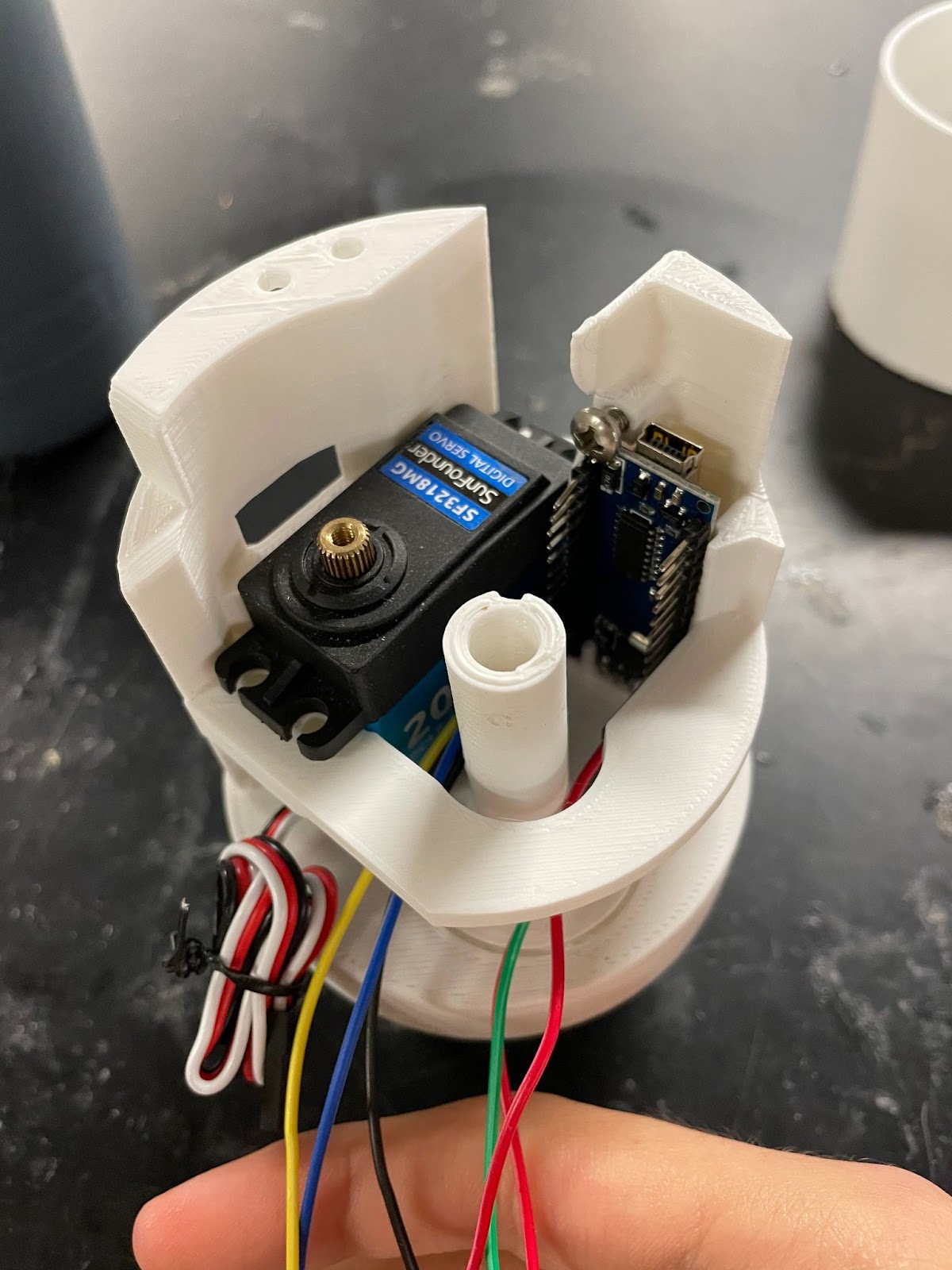
Slide the shaft into the motorbox base from the bottom up. Make sure it fits between all of the Arduino wires. |
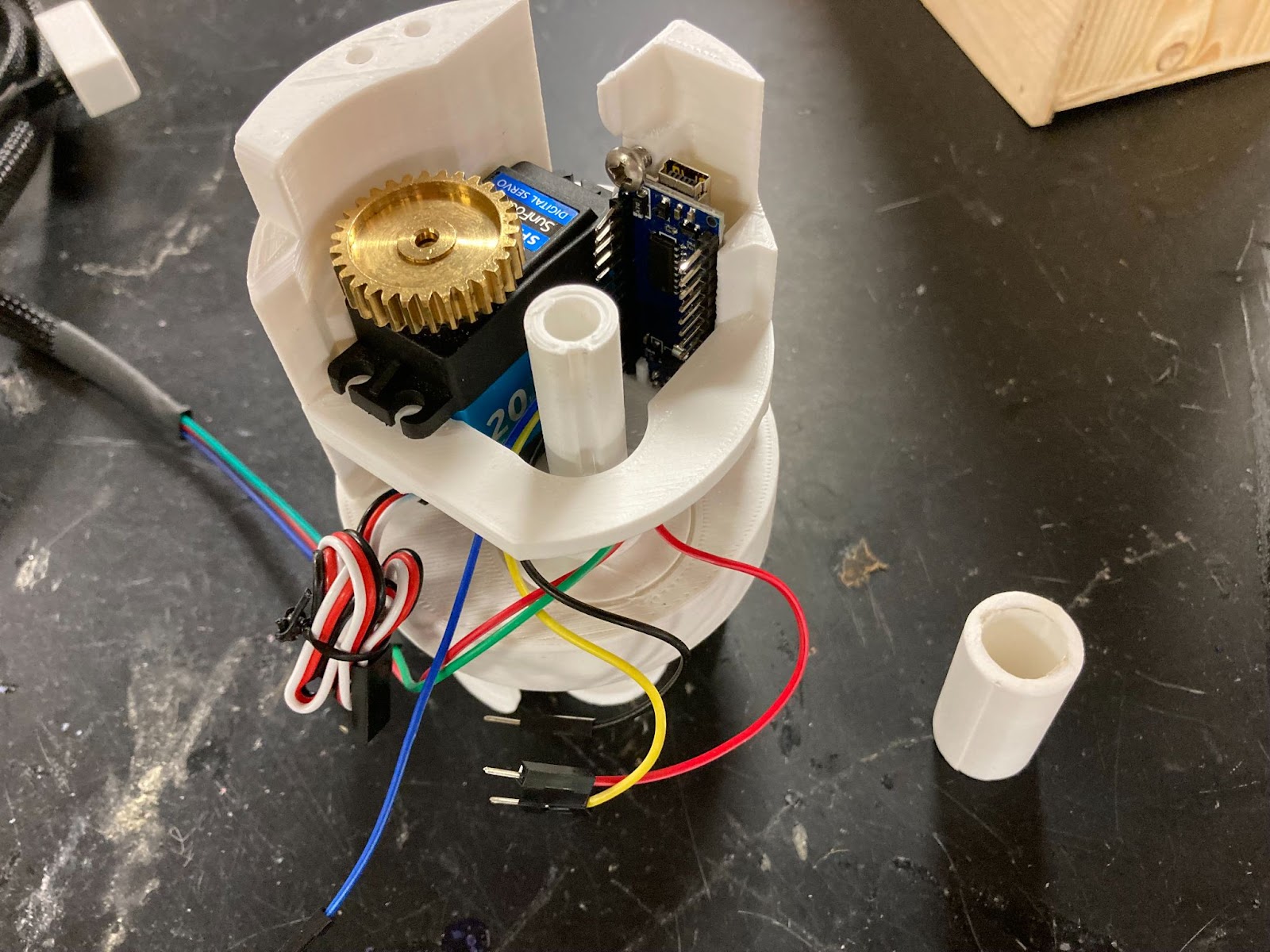

Slide spacer onto shaft Make sure it does not pinch any wiring. You may need to pull it apart to fit the spacer in. |
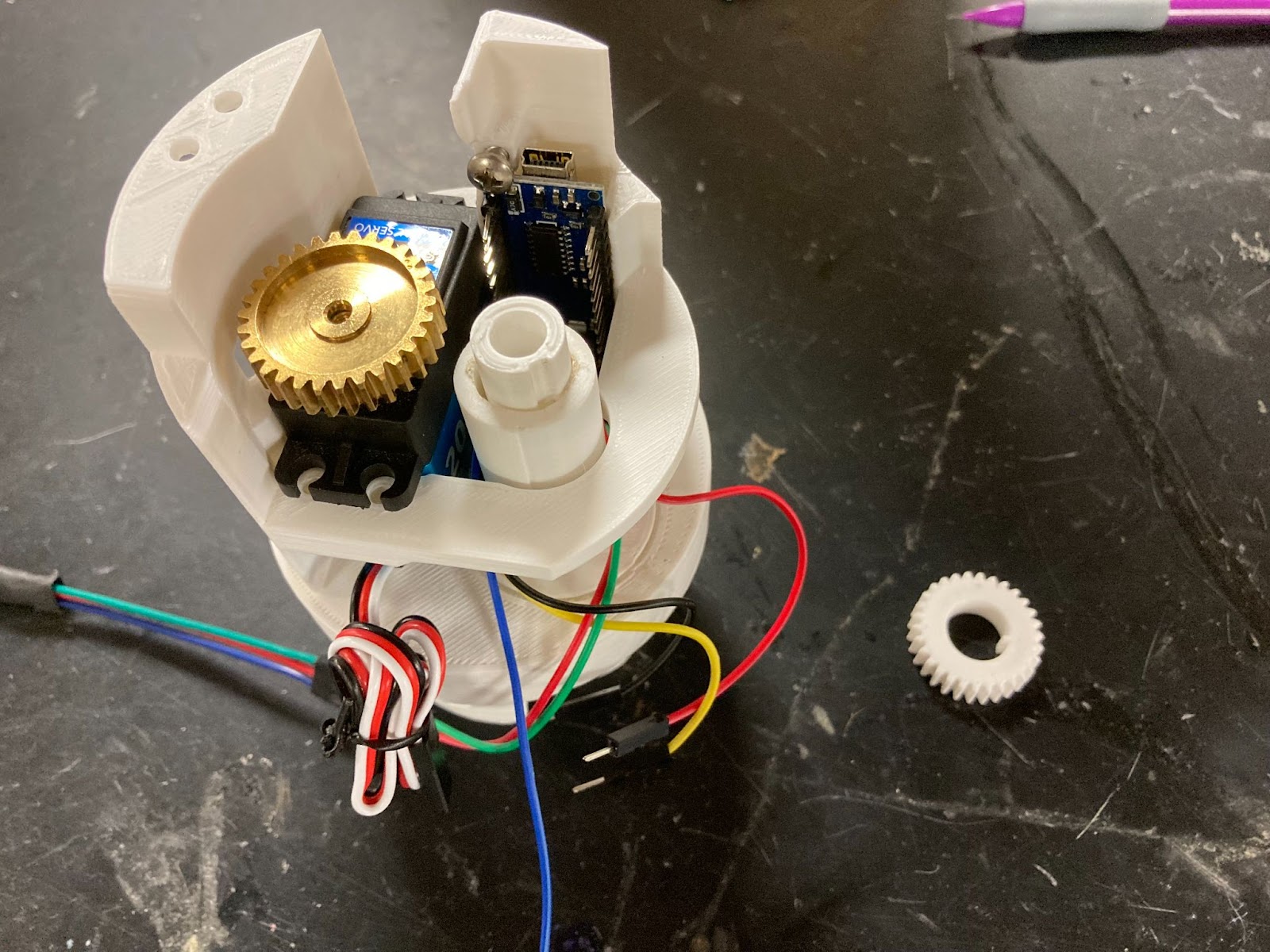

Slide gear onto shaft Make sure the notch lines up with the shaft, and the gear meshes with the servo gear. |
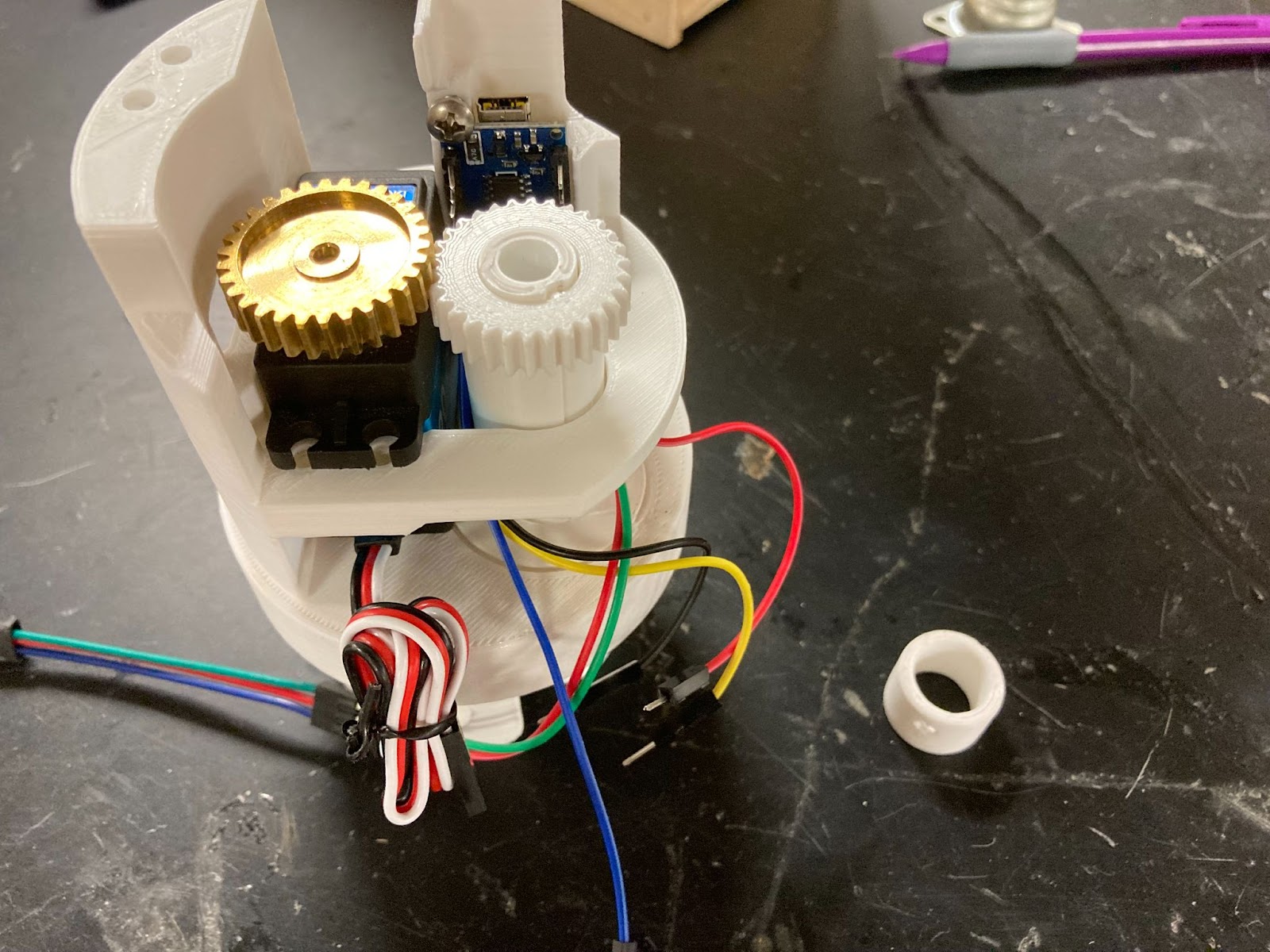


Slide shaft collar onto shaft
|

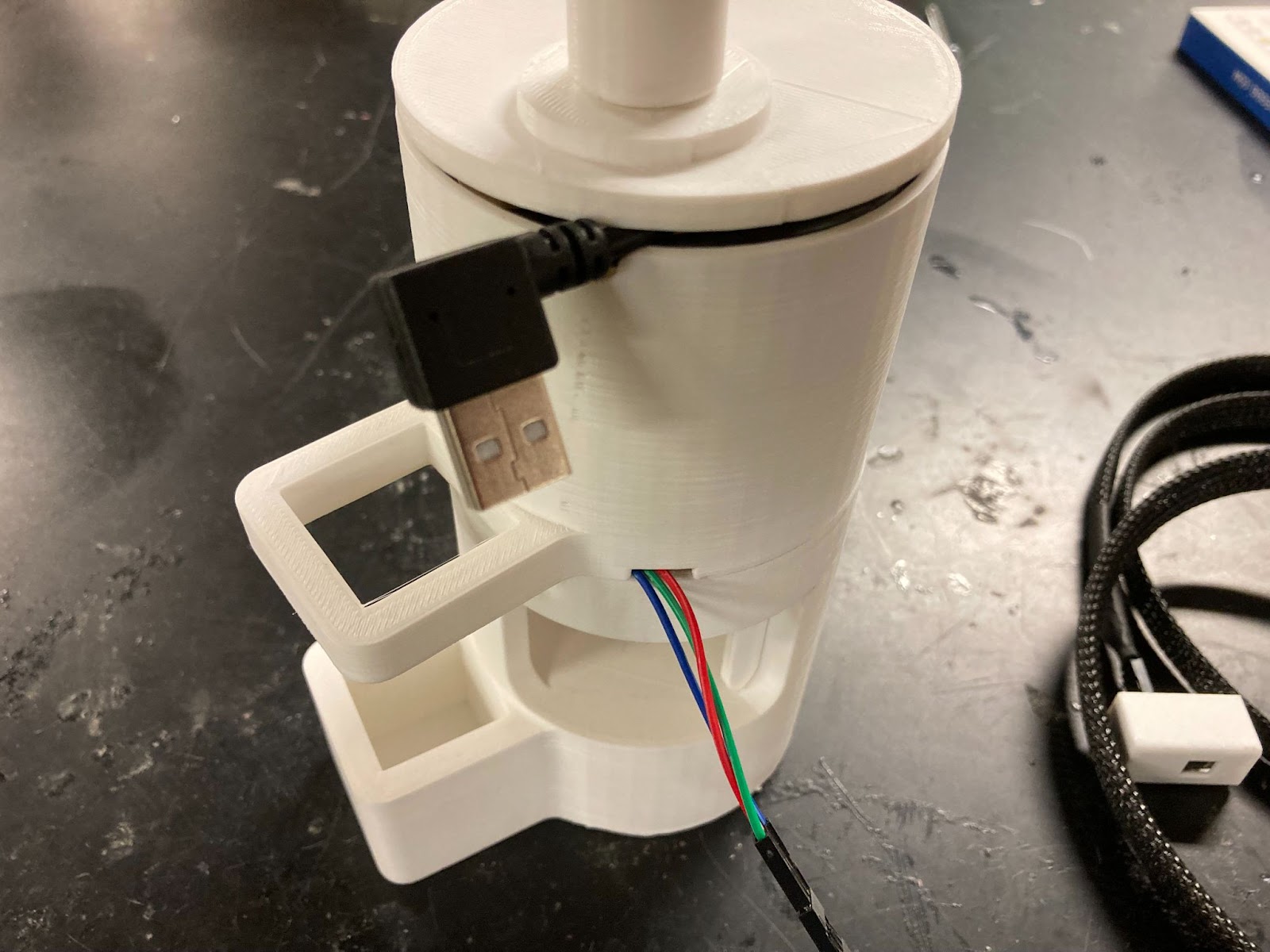
Plug micro USB cable into Arduino |
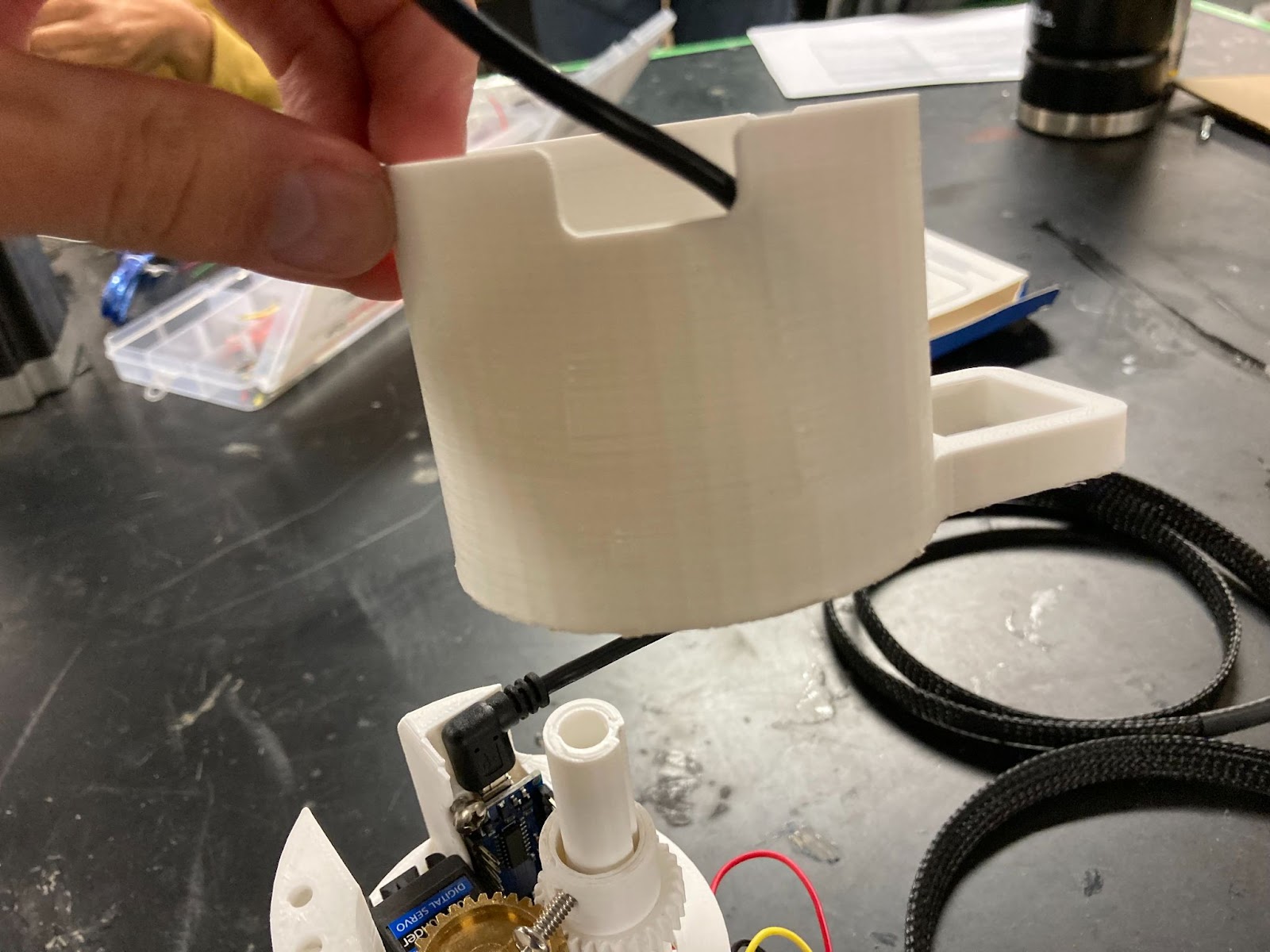

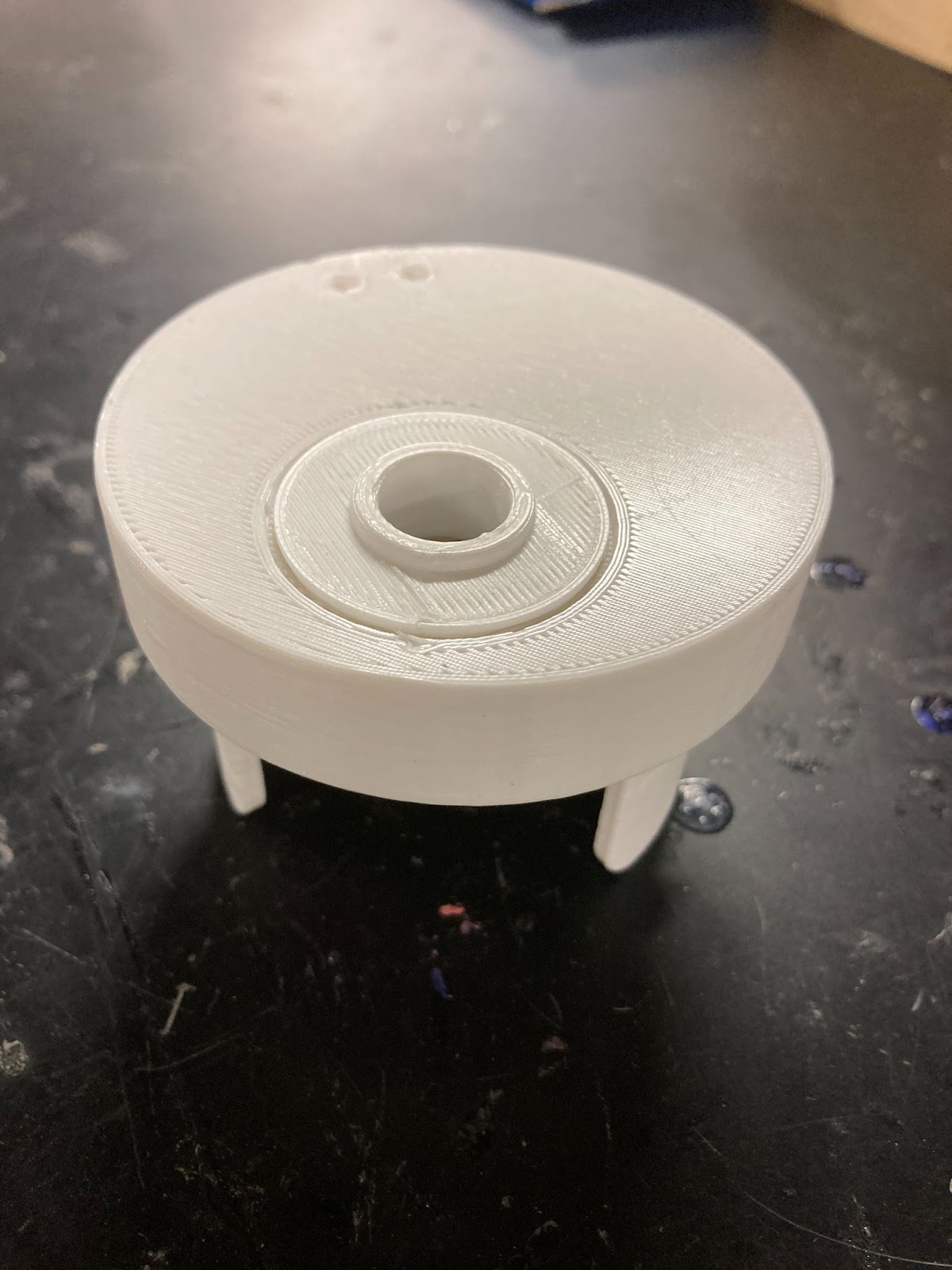
Put motor shield around the motorbox.
|




Put motor top on assembly
|



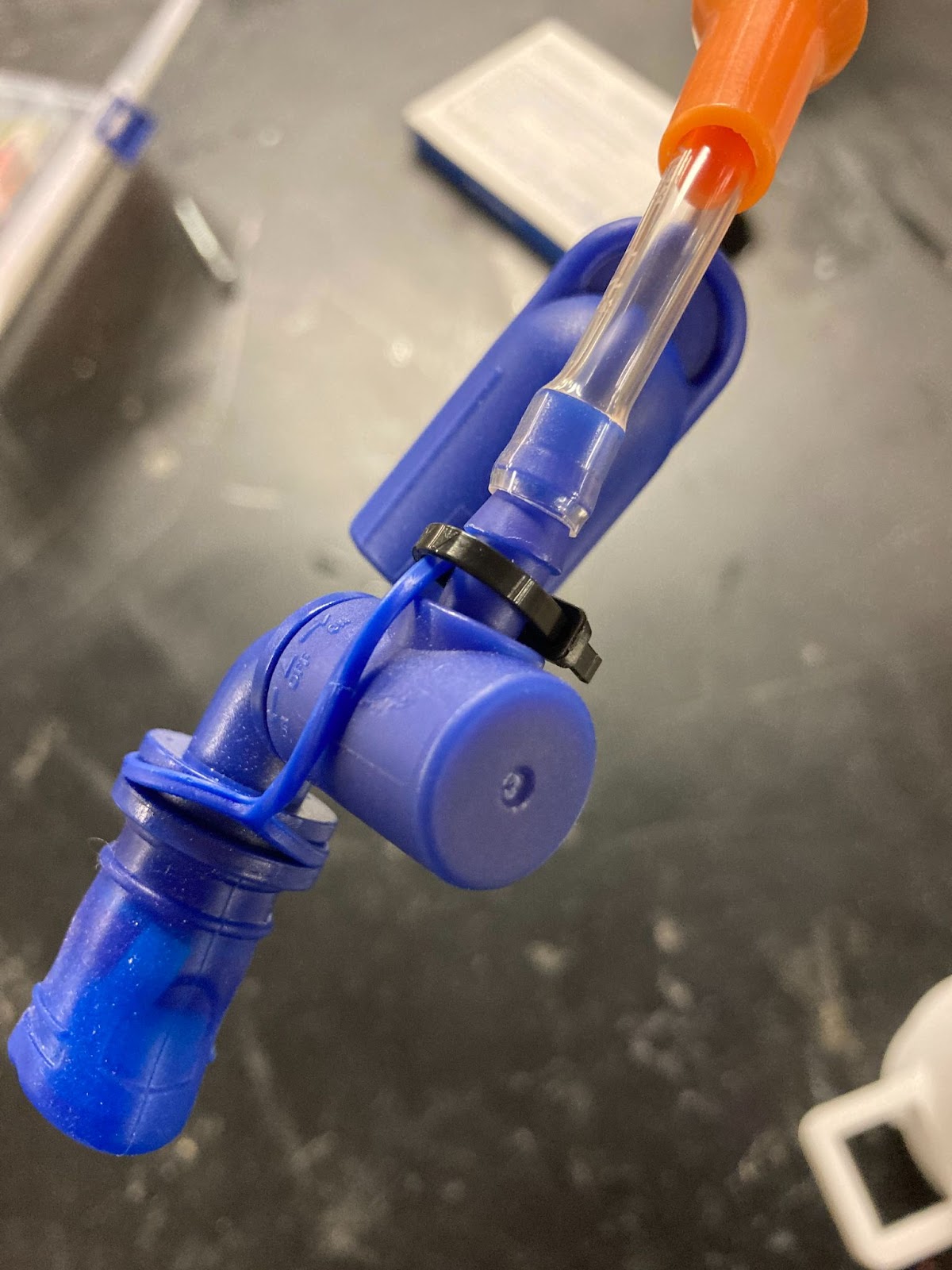
Slide the straw adapter onto the shaft- make sure the notch lines up with the shaft. Screw in a set screw. |

Cut two lengths of medical tubing
|




Assemble the straw - Smaller Diameter Tube
|


Slide tube through motorbox shaft and screw gooseneck tube onto straw adapter OR For larger tube:
|
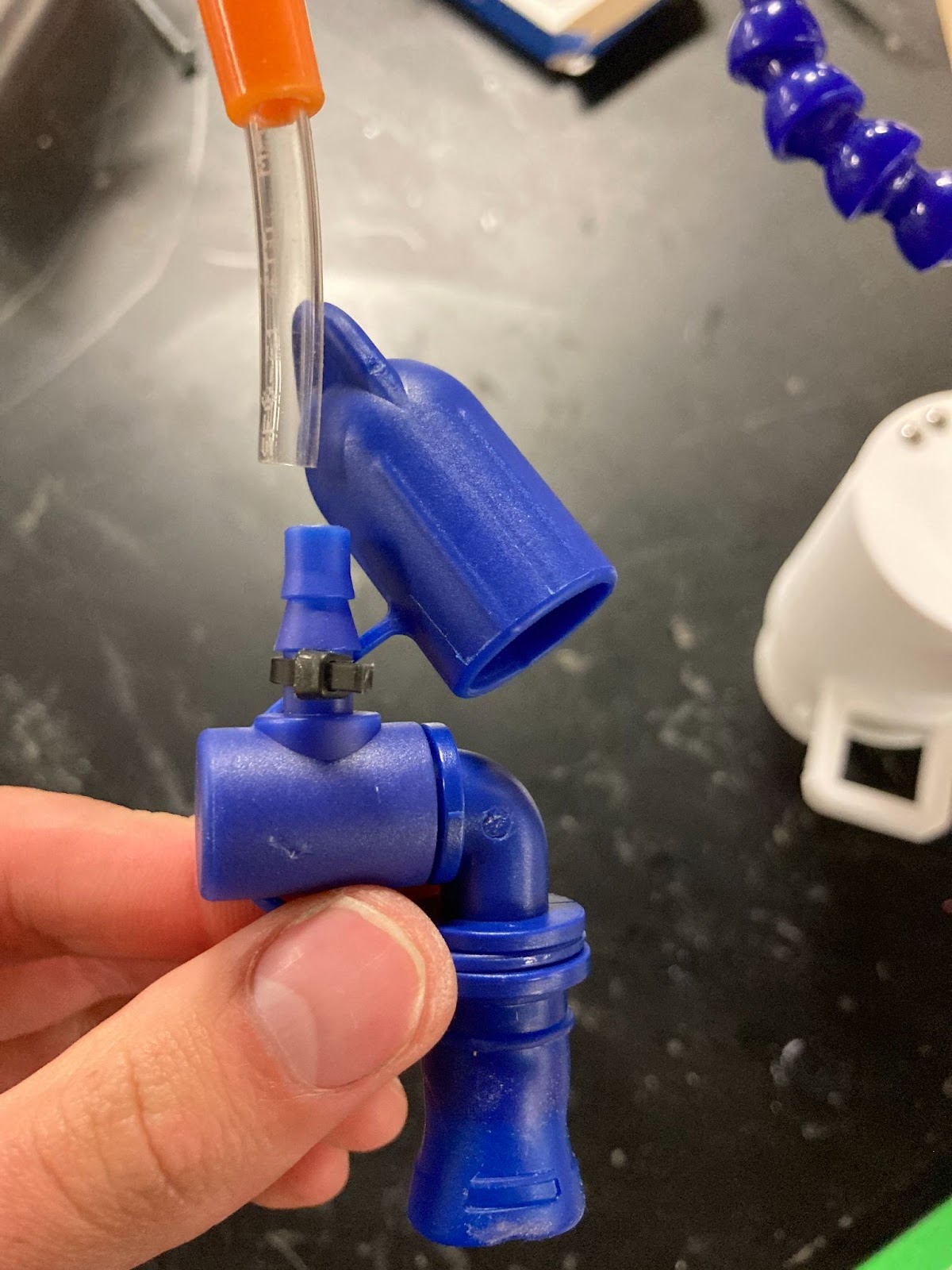
Optional - Attach bite valve medical tubing Fit the medical tubing around the barbed fitting on the bite valve. This may be a tight fit. |


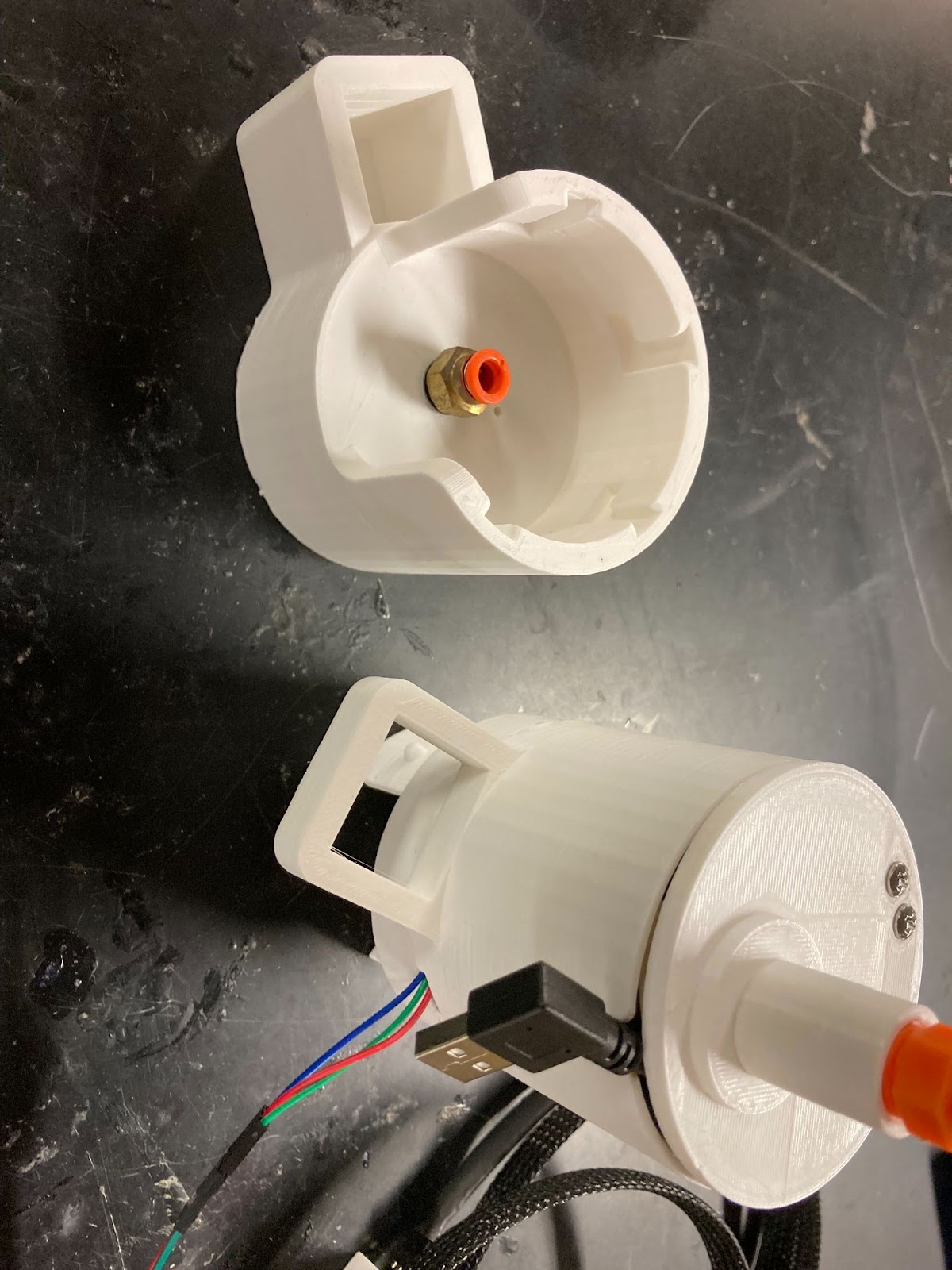
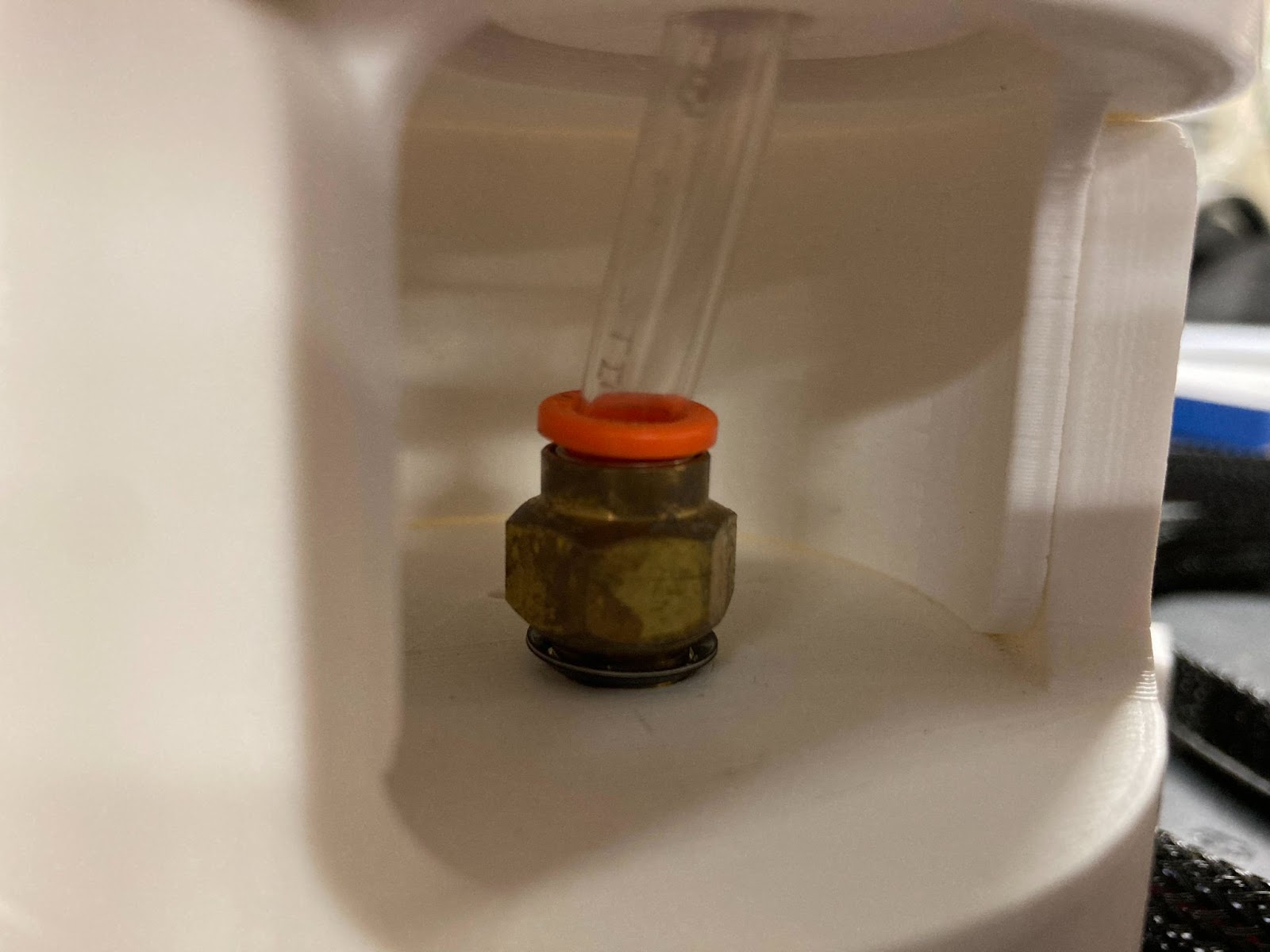
Screw Push-To-Connect fittings into the lid piece
|
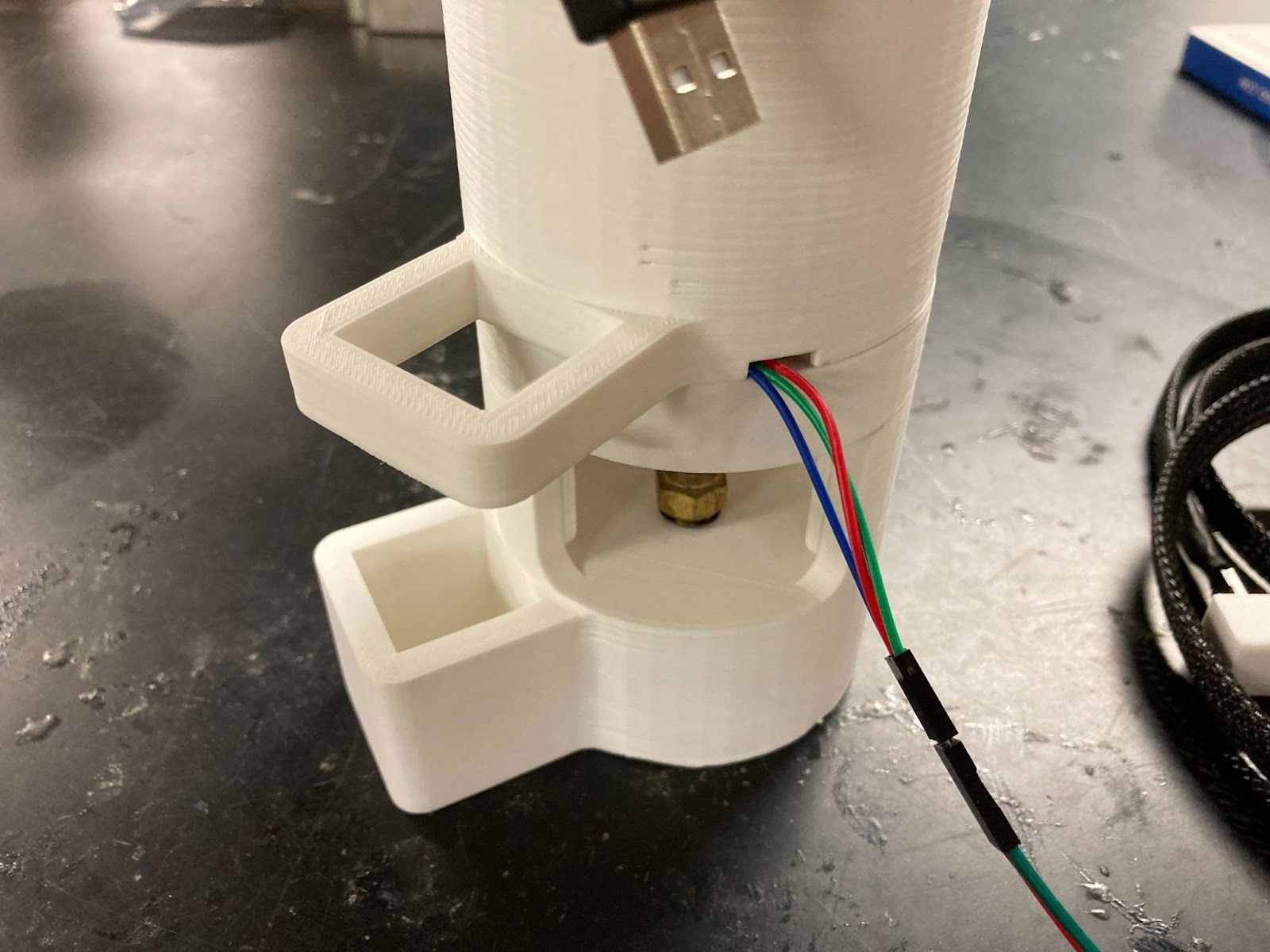
Snap motorbox into lid - simply twist to lock it in |
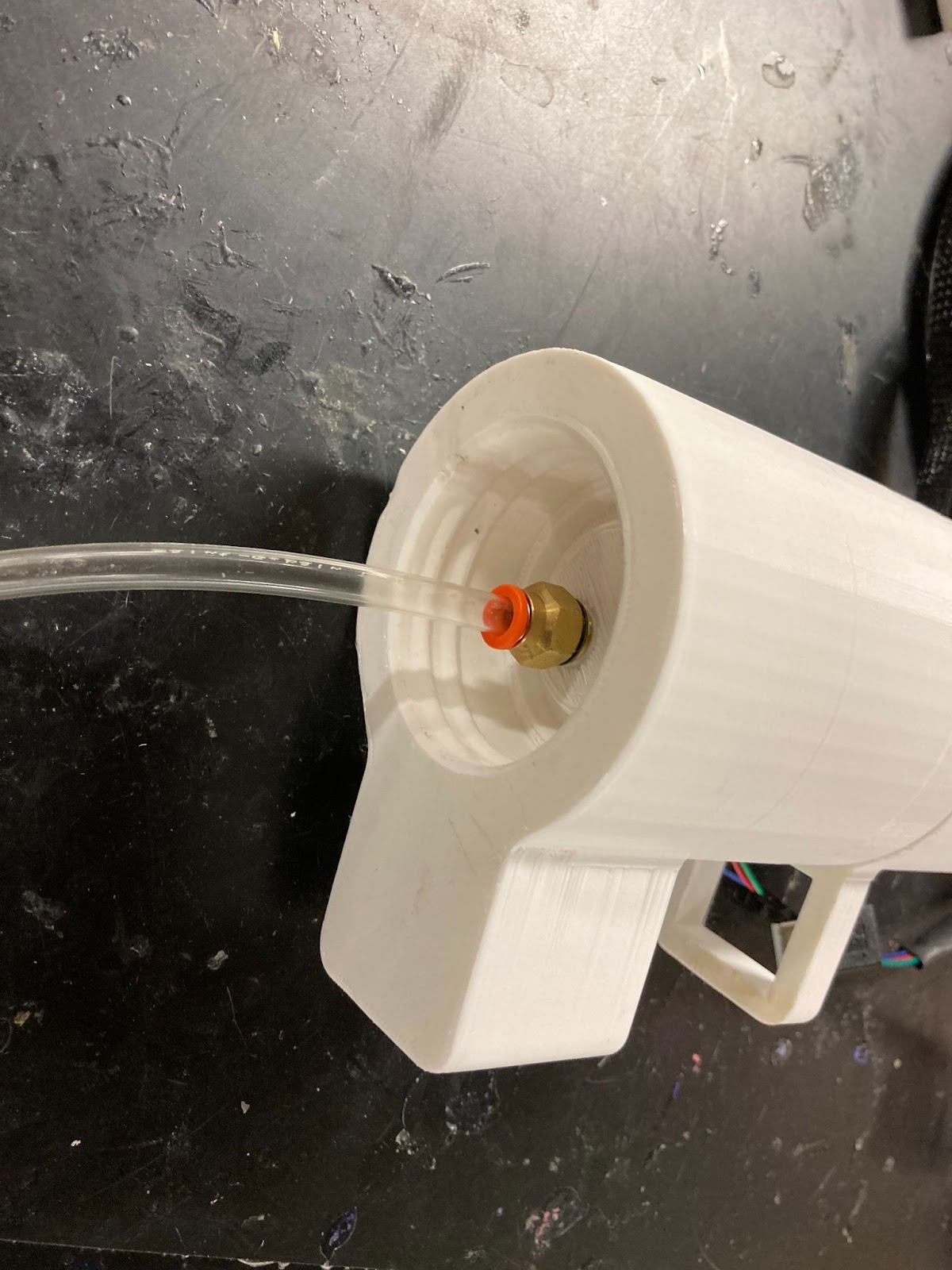
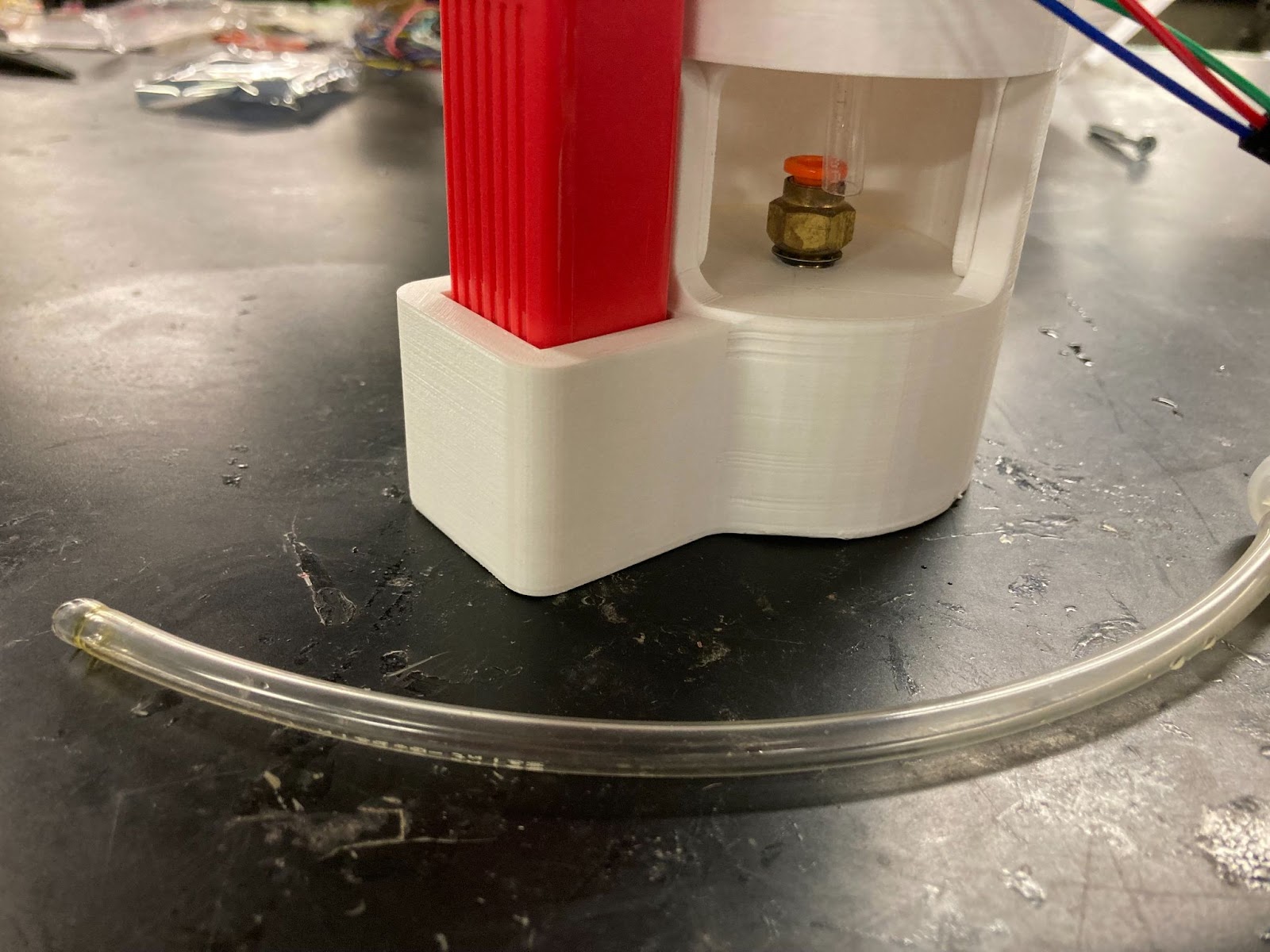
Connect tubing to push-to-connect
|


Recommended - Add a check valve to the lower medical tubing.
Fit the medical tubing around the barbed fitting on the check valve - check that it is oriented correctly. If installed correctly, after water flows into the straw it will not be able to flow back out into the water bottle.



Fill up your thermos/water bottle with water and screw the lid on
- First, remove the O-ring (a white rubber ring) from the lid that came with the thermos/water bottle.
- Install the O-ring in the 3d printed lid piece in a similar manner.
- Do not overtighten the lid
You have finished your RoboCup! It will fit in most standard 3in cupholders. We recommend using extra velcro strips to make sure that robocup does not rotate freely in the cupholder
Instructions and files to make a custom cupholder for different wheelchairs will be posted shortly
Cleaning

- Screw lid off of water bottle and dump out contents
- Remove medical tubing from push to connects
- Twist motor box off of lid
- Remove gooseneck tubing from motorbox and pull out medical tubing
- Wash gooseneck, tubing, and lid by hand, dishwash water bottle


DO wash these | DON’T wash these |
Reassemble using the same steps:
|
Contact usOshman Engineering Design Kitchen 6100 Main Street MS 390 | Houston, Texas | 77005 Phone: 713.348.OEDK Email: oedk@rice.edu | Lead Industry Partners
|
